Robotic arm for lunar exploration – brazo robótico para la exploración lunar by SC
San Cernin Pamplona-Navarra España 16 años 4 / 0 Español Luna
Enlace externo para el diseño en 3D de Tinkercad
Descripción del proyecto
Autores: Jiahui, Andoni y Jesus
CONDICIONES DE LA LUNA:
Temperatura:Día máximo de 214 grados celsius, noche mínimo de -184 grados celsius
Presión: 3 x 10^-10 Pa
PRESENTACIÓN DEL PROYECTO
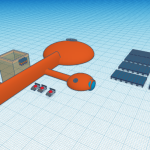
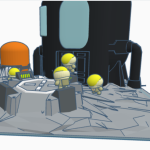
El principal uso de este brazo es el transporte de objetos de gran tamaño, de cara a poder ayudar a los tripulantes de las naves cuando salen al espacio. Esta misión tiene como objetivo principal servir de inspiración para futuras misiones y proyectos espaciales en otros planetas.
Materiales:
Debido a estas temperaturas y a la presión,el brazo robótico estará construido de vidrio metálico, los engranajes del brazo también estarán construidos de vidrio metálico.
Esto hará que cuando el brazo robótico esté funcionando no se salgan los engranajes,este material es resistente a las diferentes temperaturas tanto de día y como de noche y soporta la presión atmosférica de la Luna.
Explicación del porqué del uso de vidrio metálico:
https://www.dialum.com/producto-detalle/15/templados#:~:text=El%20vidrio%20templado%20resiste%20cambios,de%20hasta%20120%20%C2%B0C.
Partes del brazo:
Dos extremidades(brazos) de aproximadamente 5 metros de largo: Para que tenga mayor rango de alcance.
Dos mecanismos de agarre: Para poder coger o agarrar los objetos
Dos muñecas con articulaciones : Para tener mayor espacio para coger cosas u objetos
Una articulación de codo: Para una mejor movilidad del brazo
Un ordenador de control del brazo: Para controlar el brazo
Traducción al inglés
Autores: Jiahui, Andoni y Jesús
CONDICIONES LUNARES:
Temperatura: Máxima diurna de 214 grados Celsius, mínima nocturna de -184 grados Celsius
Presión: 3 x 10^-10 Pa
PRESENTACIÓN DEL PROYECTO
El principal uso de este brazo es transportar objetos de gran tamaño, con el fin de ayudar a la tripulación de las naves cuando salen al espacio. El principal objetivo de esta misión es servir de inspiración para futuras misiones y proyectos espaciales en otros planetas.
Materiales:
Debido a estas temperaturas y presiones, el brazo robótico estará construido de vidrio metálico, los engranajes del brazo también estarán construidos de vidrio metálico.
Esto garantizará que los engranajes no se salgan cuando el brazo robótico esté trabajando. Este material es resistente a diferentes temperaturas tanto de día como de noche y soporta la presión atmosférica de la Luna.
Explicación de por qué se utiliza el vidrio metálico:
https://www.dialum.com/producto-detalle/15/templados#:~:text=El%20vidrio%20templado%20resiste%20cambios,from%20until%20120%20%C2%B0C.
Partes del brazo:
Dos extremidades (brazos) de aproximadamente 5 metros de longitud: Para que tenga un mayor alcance.
Dos mecanismos de agarre: Para poder coger o agarrar objetos
Dos muñecas con articulaciones: Para tener más espacio para coger cosas u objetos
Una articulación de codo: Para mejorar la movilidad del brazo
Un ordenador de control del brazo: Para controlar el brazo
#Diseño 3D
Otros proyectos
Campamento Bodacious JARM