Robotic arm for lunar exploration – brazo robótico para la exploración lunar by SC
San Cernin Pamplona-Navarra Espanja 16 vuotta vanha 4 / 0 Espanjan Kuu
Ulkoinen linkki Tinkercad 3D-suunnitteluun
Hankkeen kuvaus
Autores: Jiahui, Andoni y Jesus
CONDICIONES DE LA LUNA:
Lämpötila:Día máximo de 214 grados celsius, noche mínimo de -184 grados celsius
Paine: 3 x 10^-10 Pa
HANKKEEN ESITTELY
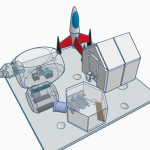
El principal uso de este brazo es el transporte de objetos de gran tamaño, de cara a poder ayudar a los tripulantes de las naves cuando salen al espacio. Esta misión tiene como objetivo principal servir de inspiración para futuras misiones y proyectos espaciales en otros planetas.
Materiales:
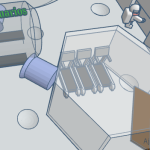
Debido a estas temperaturas y a la presión,el brazo robótico estará construido de vidrio metálico, los engranajes del brazo también estará construido de vidrio metálico.
Esto hará que cuando el brazo robótico esté funcionando no se salgan los engranajes,este material es resistente a las diferentes temperaturas tanto de día y como de noche y soporta la presión atmosférica de la Luna.
Explicación del porqué del uso de vidrio metálico:
https://www.dialum.com/producto-detalle/15/templados#:~:text=El%20vidrio%20templado%20resiste%20cambios,de%20hasta%20120%20%C2%B0C.
Partes del brazo:
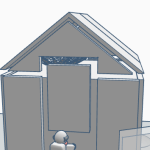
Dos extremidades(brazos) de aproximadamente 5 metros de largo: Para que tenga mayor rango de alcance.
Dos mecanismos de agarre: Para poder coger o agarrar los objetos: Para poder coger o agarrar los objetos
Dos muñecas con articulaciones : Para tener mayor espacio para coger cosas u objetos
Una articulación de codo: Para mejor movilidad del brazo
Un ordenador de control del brazo: Para controlar el brazo
Englanninkielinen käännös
Kirjoittajat: Jiahui, Andoni ja Jesus
KUUN OLOSUHTEET:
Lämpötila: Celsius, yöllä vähintään -184 astetta Celsius.
Paine: 3 x 10^-10 Pa
PROJEKTIN ESITTELY
Tämän käsivarren pääasiallinen käyttötarkoitus on suurten esineiden kuljettaminen, jotta alusten miehistöä voidaan auttaa, kun ne lähtevät avaruuteen. Tämän tehtävän päätavoitteena on toimia inspiraationa tuleville tehtäville ja avaruushankkeille muilla planeetoilla.
Materiaalit:
Näiden lämpötilojen ja paineen vuoksi robottikäsi rakennetaan metallilasista, ja myös käsivarren hammaspyörät rakennetaan metallilasista.
Näin varmistetaan, että hammaspyörät eivät irtoa, kun robottivarsi toimii. Tämä materiaali kestää eri lämpötiloja sekä päivällä että yöllä ja kestää Kuun ilmakehän paineen.
Selitys siitä, miksi metallilasia käytetään:
https://www.dialum.com/producto-detalle/15/templados#:~:text=El%20vidrio%20templado%20resiste%20cambios,from%20until%20120%20%C2%B0C.
Käsivarren osat:
Kaksi noin 5 metriä pitkää raajaa (kättä): Jotta se yltää laajemmalle.
Kaksi tarttumismekanismia: Pystyäksesi poimimaan tai tarttumaan esineisiin.
Kaksi nukkea, joissa on nivelet: Jotta sinulla olisi enemmän tilaa poimia tavaroita tai esineitä.
Kyynärnivel: Käden liikkuvuuden parantamiseksi
Käsivarren ohjaustietokone: Käsivarren ohjaamiseen
#3D-suunnittelu
Muut hankkeet
CAMP DE BASE LUNAIRE SNICKER