Robotic arm for lunar exploration – brazo robótico para la exploración lunar by SC
San Cernin Pampelune-Navarra Espagne 16 ans 4 / 0 Espagnol Lune
Lien externe pour la conception 3D Tinkercad
Description du projet
Autores : Jiahui, Andoni et Jesus
CONDITIONS DE LA LUNE :
Température : Jour maximum de 214 degrés Celsius, nuit minimum de -184 degrés Celsius
Pression : 3 x 10^-10 Pa
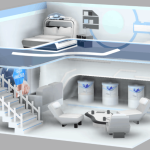
PRÉSENTATION DU PROJET
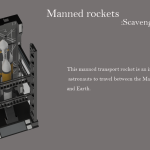
L'utilisation principale de ce bras est le transport d'objets de grande taille, afin d'aider les tripulantes des nefs à sortir de l'espace. Cette mission a pour objectif principal de servir d'inspiration pour de futures missions et projets spatiaux sur d'autres planètes.
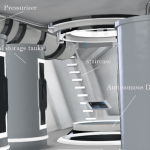
Matériaux :
En raison de ces températures et de la pression, le bras robotisé est construit en acier inoxydable, et les engranages du bras sont également construits en acier inoxydable.
Ce matériau résiste aux différentes températures tant du jour que de la nuit et supporte la pression atmosphérique de la Lune.
Explication du pourquoi de l'utilisation du verre métallisé :
https://www.dialum.com/producto-detalle/15/templados#:~:text=El%20vidrio%20templado%20resiste%20cambios,de%20hasta%20120%20%C2%B0C.
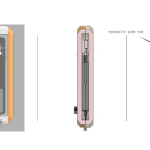
Partes del brazo :
Dos extremidades(brazos) de aproximadamente 5 metros de largo : Para que tenga mayor rango de alcance.
Dos mecanismos de agarre : Pour coger ou agarer les objets
Dos muñecas con articulaciones : Para tener mayor espacio para coger cosas u objetos
Une articulation de code : Pour une meilleure mobilité du bras
Un dispositif de contrôle du bras : Para controlar el brazo
Traduction en anglais
Auteurs : Jiahui, Andoni et Jesus
CONDITIONS LUNAIRES :
Température : Maximum diurne de 214 degrés Celsius, minimum nocturne de -184 degrés Celsius
Pression : 3 x 10^-10 Pa
PRÉSENTATION DU PROJET
L'utilisation principale de ce bras est de transporter de gros objets, afin d'aider l'équipage des vaisseaux lorsqu'ils vont dans l'espace. L'objectif principal de cette mission est de servir d'inspiration pour de futures missions et projets spatiaux sur d'autres planètes.
Matériaux :
En raison de ces températures et de cette pression, le bras robotique sera construit en verre métallique, et les engrenages du bras seront également construits en verre métallique.
Cela permet d'éviter que les engrenages ne se détachent lorsque le bras robotique fonctionne. Ce matériau résiste aux différentes températures, de jour comme de nuit, et à la pression atmosphérique de la Lune.
Explication de l'utilisation du verre métallique :
https://www.dialum.com/producto-detalle/15/templados#:~:text=El%20vidrio%20templado%20resiste%20cambios,from%20until%20120%20%C2%B0C.
Pièces du bras :
Deux membres (bras) d'environ 5 mètres de long : afin d'avoir un plus grand rayon d'action.
Deux mécanismes de préhension : Pour pouvoir ramasser ou saisir des objets
Deux poupées avec des articulations : Pour avoir plus d'espace pour prendre des choses ou des objets
Une articulation du coude : Pour une meilleure mobilité du bras
Un ordinateur de contrôle du bras : Pour contrôler le bras
#Conception 3D
Autres projets
la recherche scientifique






















-1-150x150.png)