3D Printed Wheels for Regolith by Pinewood Panthers
École internationale américaine Pinewood de Thessalonique Thessalonique - Thessalonique Grèce 14 ans 4 / 2 Anglais Lune
Description du projet
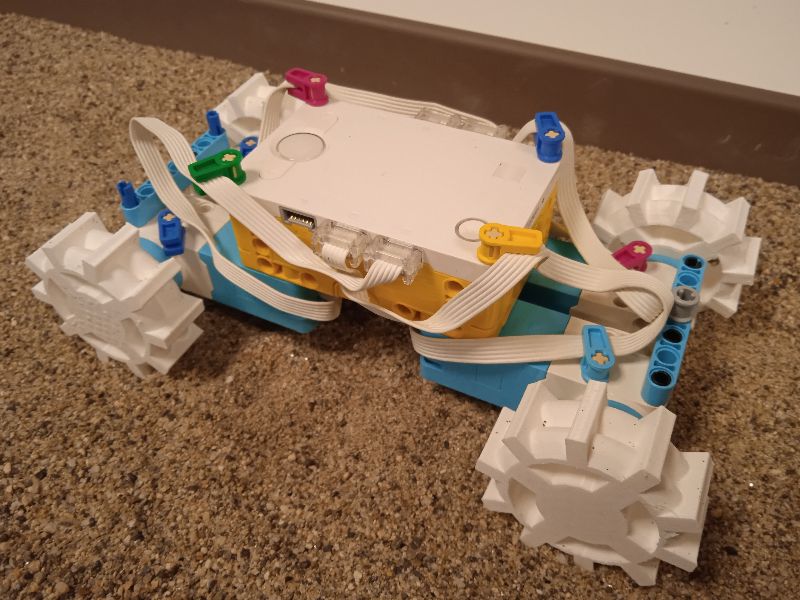
Les missions spatiales impliquent le transfert d'équipements et de ressources depuis la Terre, ce qui en augmente le coût. Les rovers, dont les pièces sont susceptibles d'être endommagées et doivent être remplacées, constituent un élément important de bon nombre de ces missions. Les dommages importants subis par les roues du rover Curiosity en sont un exemple frappant. En ce qui concerne l'exploration de la lune, une solution viable pour les futures missions consiste à utiliser les ressources locales, en particulier le régolithe lunaire, pour imprimer en 3D les équipements et les pièces de rechange. Les scientifiques prévoient déjà d'utiliser l'impression 3D dans les futures missions lunaires. Dans le cadre de notre projet, nous avons développé des roues imprimées en 3D adaptées aux rovers lunaires, améliorant ainsi leur capacité à parcourir de plus grandes distances tout en réduisant leur consommation d'énergie. Nos roues pourraient également être utilisées pour les robots nettoyeurs de plages. À cette fin, nous avons développé une particule imprimée en 3D pour le nettoyage des plages, qui a été adaptée à notre rover.
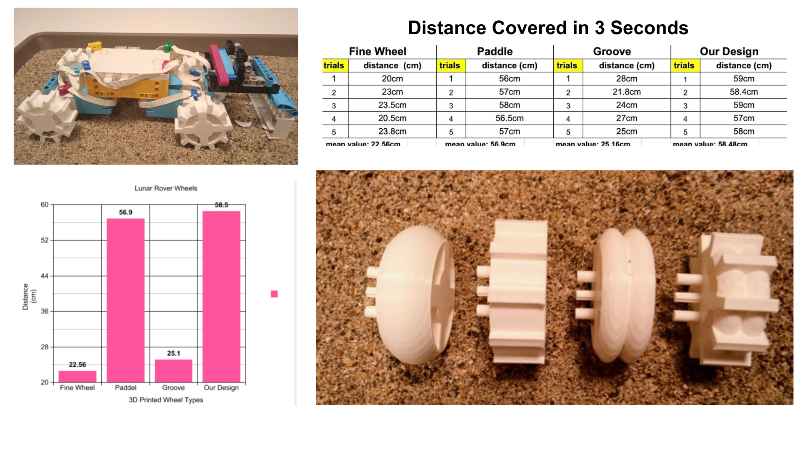
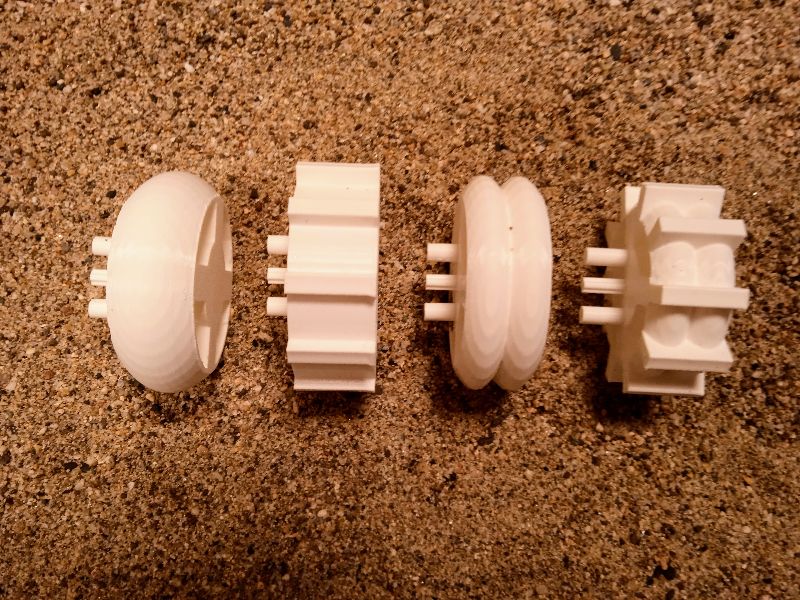
Notre solution pour utiliser des roues imprimées en 3D sur le régolithe était basée sur deux modèles de roues déjà existants, utilisant des rainures et des palettes. La fonction de la roue à palettes est basée sur la troisième loi de Newton. Cette loi stipule que pour chaque action, il y a une réaction égale et opposée. Lorsque les roues d'un véhicule poussent sur le sable, celui-ci le repousse avec une force égale dans la direction opposée. La fonction de la roue à gorge est basée sur la maximisation de la surface de contact. L'augmentation de la surface de contact crée plus de friction entre la roue et le sol, ce qui améliore la traction et l'adhérence. Notre objectif était de créer un design combinant les principes de ces deux roues afin d'obtenir un rover plus rapide et plus performant. Pour être sûrs d'avoir réussi notre mission, nous avons dû les tester. Pour notre méthode de test, nous avons appliqué les différents modèles de roues sur le rover et programmé le moteur pour qu'il se déplace à une vitesse standard (75%) pendant 3 secondes. Le terrain d'essai était constitué de sable fin simulant le régolithe. Nous avons utilisé quatre modèles de roues différents. La roue à surface fine, la palette, la rainure et notre modèle. Le diamètre de toutes les roues est resté le même, à savoir 57 cm, et la largeur de toutes les roues était de 2 cm. Pour garantir des résultats précis, nous avons testé chaque roue cinq fois, en mesurant le point de départ jusqu'au point d'arrêt. La roue la moins performante est celle de sable fin, qui n'a parcouru que 22,4 cm (moyenne). Notre roue la plus réussie est celle qui combine des palettes et une rainure, avec une distance de 58,5 cm.
#Impression 3D #Robotique
Autres projets
Le camp de la lune grecque ST2 Hellas-Ελλάδα