3D Printed Wheels for Regolith by Pinewood Panthers
Scuola internazionale americana Pinewood di Salonicco Salonicco-Salonicco Grecia 14 anni 4 / 2 Inglese Luna
Descrizione del progetto
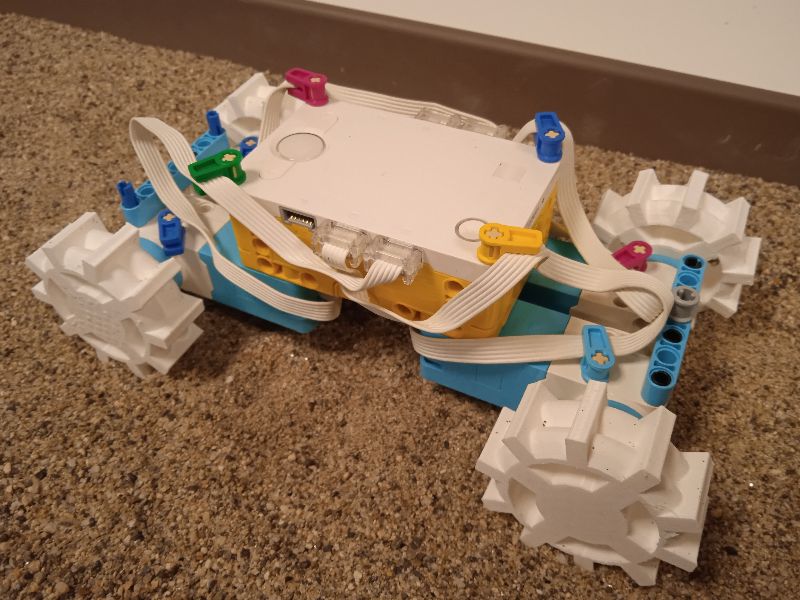
Le missioni spaziali comportano il trasferimento di attrezzature e risorse dalla Terra, il che aumenta il costo delle missioni. Un componente importante di molte di queste missioni sono i rover, le cui parti sono soggette a danni e devono essere sostituite. Gli ingenti danni alle ruote del rover Curiosity ne sono un esempio lampante. Per quanto riguarda in particolare l'esplorazione della Luna, una soluzione praticabile per le missioni future prevede l'utilizzo di risorse locali, in particolare la regolite lunare, per la stampa 3D di attrezzature e parti di ricambio. Gli scienziati stanno già progettando di utilizzare la stampa 3D nelle future missioni lunari. Nel nostro progetto, abbiamo sviluppato ruote stampate in 3D su misura per i rover lunari, migliorando la loro capacità di coprire distanze maggiori con un consumo energetico ridotto. Il nostro progetto di ruote potrebbe essere utilizzato anche nei rover per la pulizia delle spiagge. A questo scopo abbiamo sviluppato una particella stampata in 3D per la pulizia delle spiagge che è stata adattata al nostro rover.
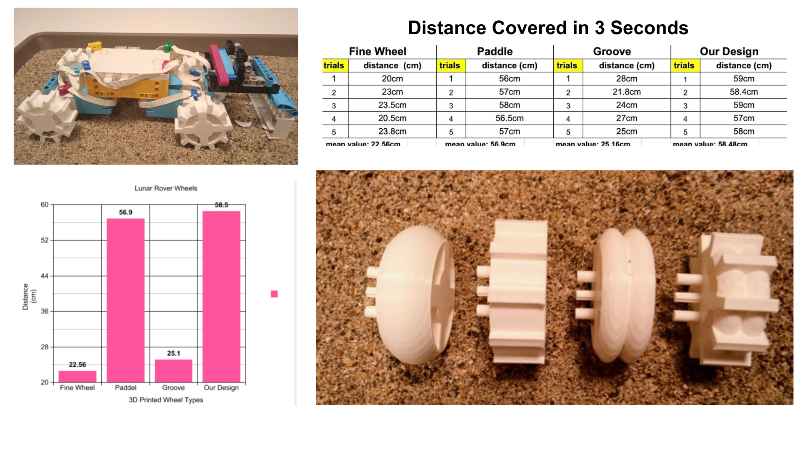
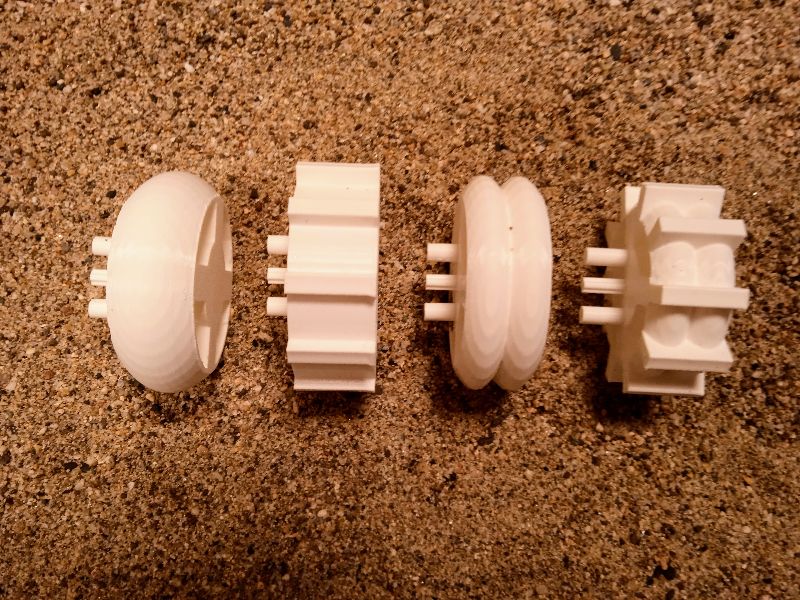
La nostra soluzione di utilizzare ruote stampate in 3D su regolite si è basata su due progetti di ruote già esistenti, che utilizzano scanalature e pale. La funzione della ruota a pale si basa sulla terza legge di Newton. Questa legge afferma che per ogni azione c'è una reazione uguale e contraria. Quando le ruote di un veicolo spingono contro la sabbia, quest'ultima spinge indietro con una forza uguale e contraria. Il funzionamento delle ruote scanalate si basa sulla massimizzazione della superficie di contatto. L'aumento della superficie di contatto crea un maggiore attrito tra la ruota e il terreno, con conseguente aumento della trazione e dell'aderenza. Il nostro obiettivo era quello di creare un progetto che combinasse i principi di queste due ruote per avere un rover più veloce e con un funzionamento migliore. Per essere sicuri di aver raggiunto la nostra missione, abbiamo dovuto testarle. Per il nostro metodo di prova abbiamo applicato i diversi progetti di ruote al rover e programmato il motore per muoversi con una velocità standard (75%) per 3 secondi. Il terreno di prova era costituito da sabbia fine che simulava la regolite. Abbiamo utilizzato quattro diversi modelli di ruote. La ruota a superficie fine, la paletta, la scanalatura e il nostro progetto. Il diametro di tutte le ruote è rimasto invariato a 57 cm e la larghezza di tutte le ruote è stata di 2 cm. Per garantire risultati accurati, abbiamo testato ogni ruota cinque volte, misurando il punto di partenza e il punto di arresto. La ruota meno riuscita è stata quella con sabbia fine, che ha percorso solo 22,4 cm (media). La ruota più riuscita è stata quella che combinava le pale con una scanalatura, con una corsa di 58,5 cm.
#Stampa 3D #Robotica
Altri progetti
Más allá de las estrellas, buscando un nuevo Hogar
Il nostro razzo nello spazio