Robotic arm for lunar exploration – brazo robótico para la exploración lunar by SC
San Cernin Pamplona-Navarra Spānija 16 gadus vecs 4 / 0 Spāņu Mēness
Tinkercad 3D dizaina ārējā saite
Projekta apraksts
Autori: M: Autori: Jiahui, Andoni y Jesus
CONDICIONES DE LA LUNA:
Temperatūra:Día máximo de 214 grados celsius, noche mínimo de -184 grados celsius
Spiediens: 3 x 10^-10 Pa
PRESENTACIÓN DEL PROYECTO
El principal uso de este brazo es el transporte de objetos de gran tamaño, de cara a poder ayudar a los tripulantes de las naves cuando salen al espacio. Esta misión tiene como objetivo principal servir de inspiración para futuras misiones y proyectos espaciales en otros planetas.
Materiāli:
Debido a estas temperaturas y a la presión,el brazo robótico estará construido de vidrio metálico, los engranajes del brazo también estará construido de vidrio metálico.
Esto hará que cuando el brazo robótico esté funcionando no se salgan los engranajes,este material es resistente a las diferentes temperaturas tanto de día y como de noche y soporta la presión atmosférica de la Luna.
Explicación del porqué del uso de vidrio metálico:
https://www.dialum.com/producto-detalle/15/templados#:~:text=El%20vidrio%20templado%20resiste%20cambios,de%20hasta%20120%20%C2%B0C.
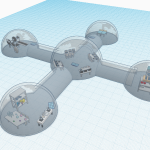
Partes del brazo:
Dos extremidades(brazos) de aproximadamente 5 metros de largo: Para que tenga mayor rango de alcance.
Dos mecanismos de agarre: Para poder coger o agarrar los objetos
Dos muñecas con articulaciones : Para tener mayor espacio para coger cosas u objetos
Una articulación de codo: Para mejor movilidad del brazo
Un ordenador de control del brazo: Para controlar el brazo
Tulkojums angļu valodā
Autori: Autori: Jiahui, Andoni un Jēzus
MĒNESS APSTĀKĻI:
Temperatūra: Dienas maksimums 214 grādi pēc Celsija, nakts minimums -184 grādi pēc Celsija
Spiediens: 3 x 10^-10 Pa
PROJEKTA PREZENTĀCIJA
Šī roka galvenokārt tiek izmantota lielu priekšmetu transportēšanai, lai palīdzētu kuģu apkalpei, kad tie dodas kosmosā. Šīs misijas galvenais mērķis ir kalpot par iedvesmu turpmākām misijām un kosmosa projektiem uz citām planētām.
Materiāli:
Šo temperatūru un spiediena dēļ robotizētā roka būs izgatavota no metāliska stikla, arī rokas zobrati būs izgatavoti no metāliska stikla.
Tas nodrošinās, ka zobrats neizslēgsies, kad robota roka darbojas. Šis materiāls ir izturīgs pret dažādām temperatūrām gan dienā, gan naktī, kā arī Mēness atmosfēras spiedienu.
Paskaidrojums, kāpēc tiek izmantots metāla stikls:
https://www.dialum.com/producto-detalle/15/templados#:~:text=El%20vidrio%20templado%20resiste%20cambios,from%20until%20120%20%C2%B0C.
Rokas daļas:
Divas ekstremitātes (rokas) aptuveni 5 metrus garas: Lai tam būtu lielāks sasniedzamības diapazons.
Divi satvēriena mehānismi: Lai varētu pacelt vai satvert priekšmetus
Divas lelles ar locītavām: Lai būtu vairāk vietas, kur paņemt lietas vai priekšmetus.
Elkoņa locītava: Labākai rokas mobilitātei
Rokas vadības dators: Lai vadītu roku
#3D dizains
Citi projekti