

Moon Camp Discovery 2021-2022 Galerija projektov
Vse | Lunarno pristajalno vozilo | Baza na Luni | Lunarni rover | Raketa | Lunarna orbitalna vesoljska postaja| Vesoljske obleke
Team: Sara Mohammed Abdulla
Kategorija: Lunarni rover | Abu Dabi | Združeni arabski emirati | 1 | 14 let
Zunanja povezava za oblikovanje Tinkercad 3D
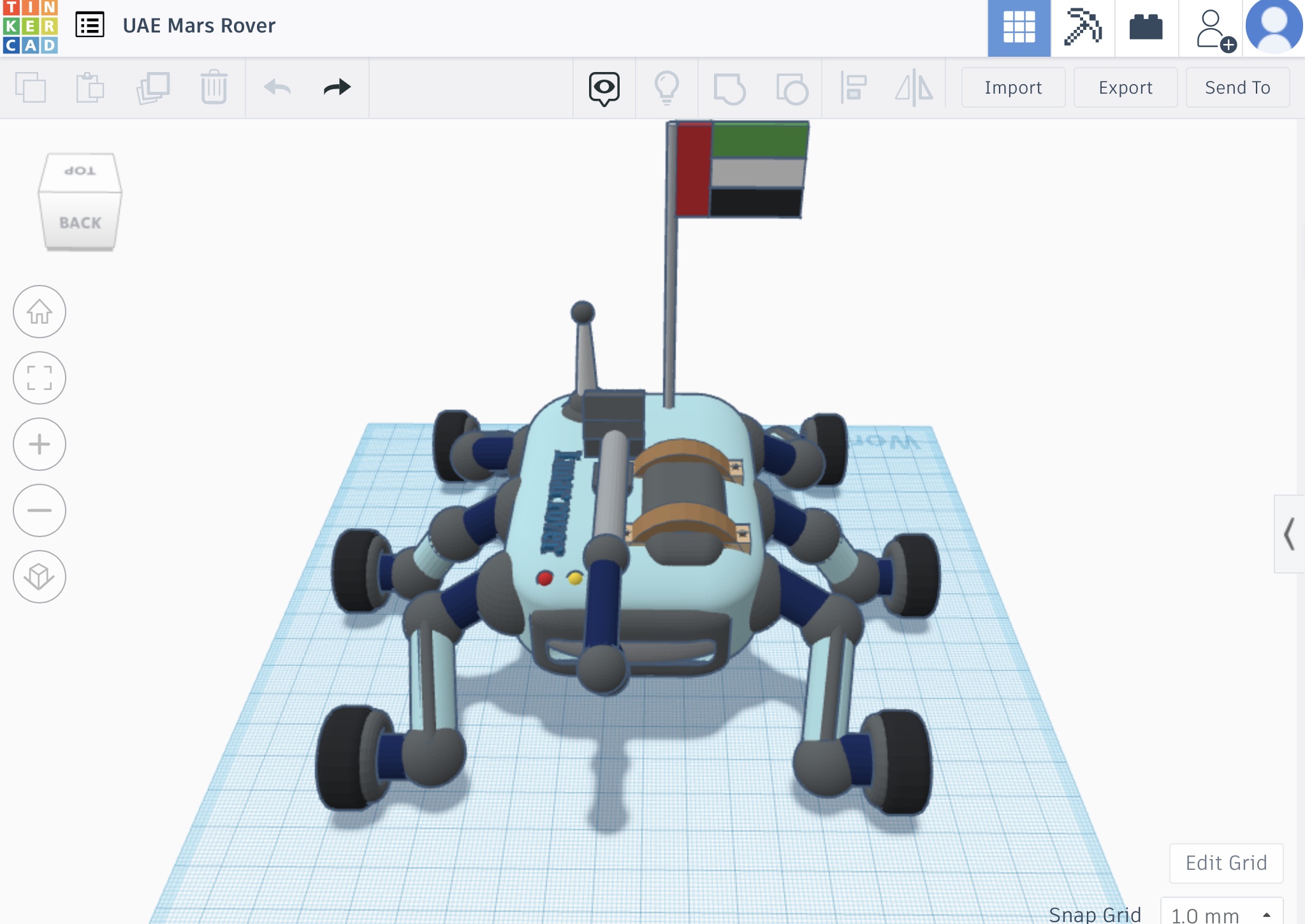
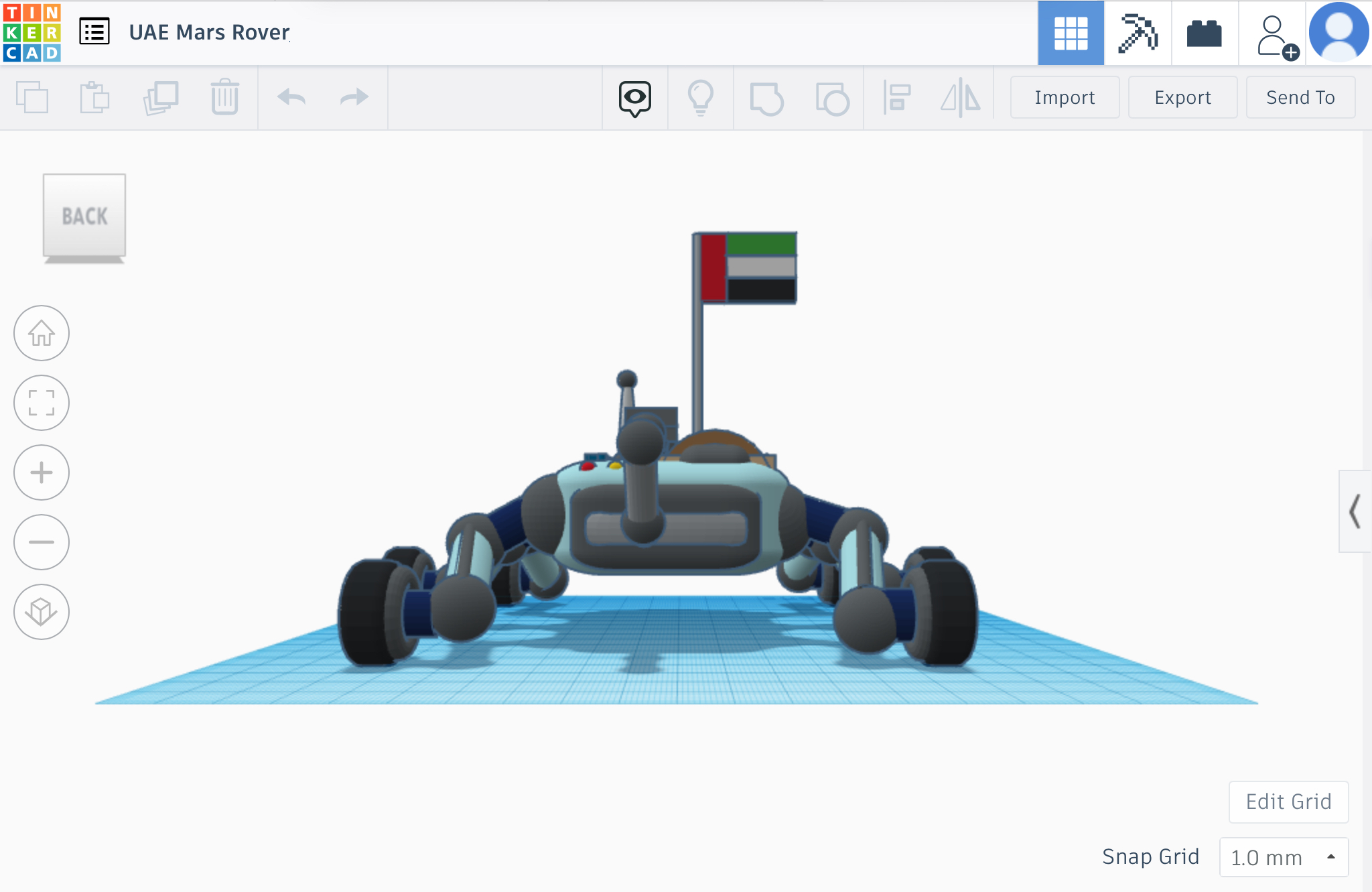
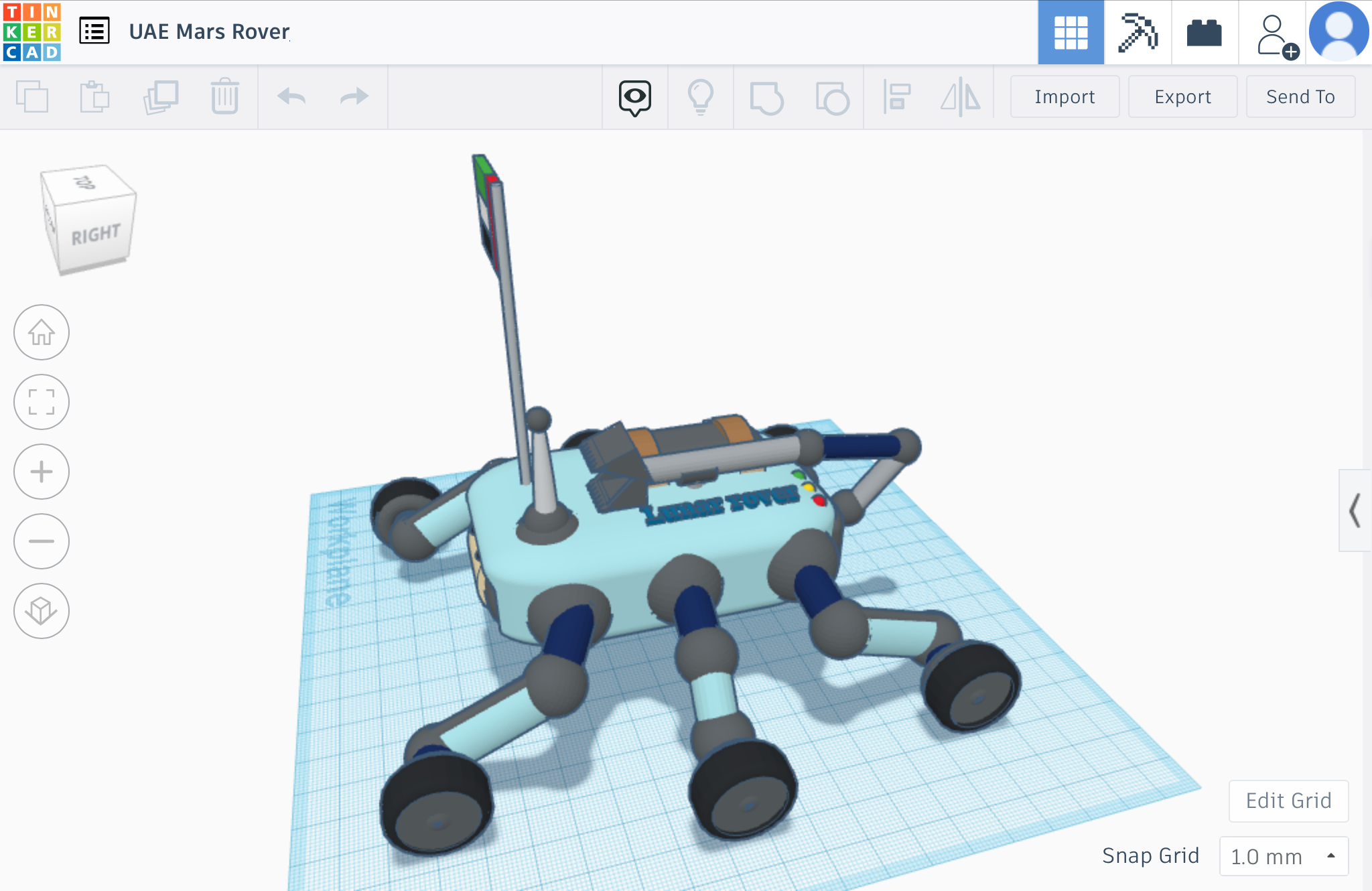
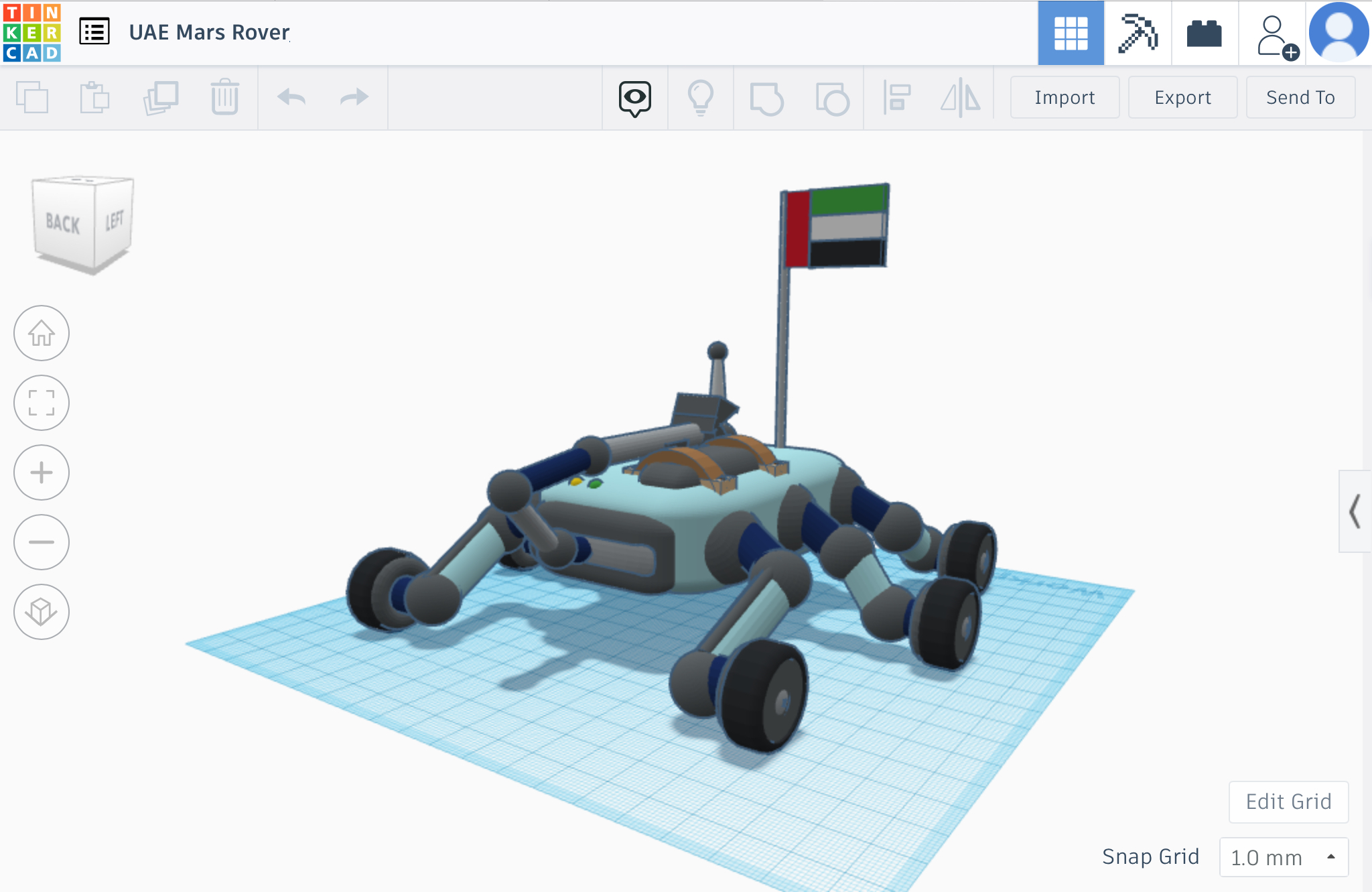
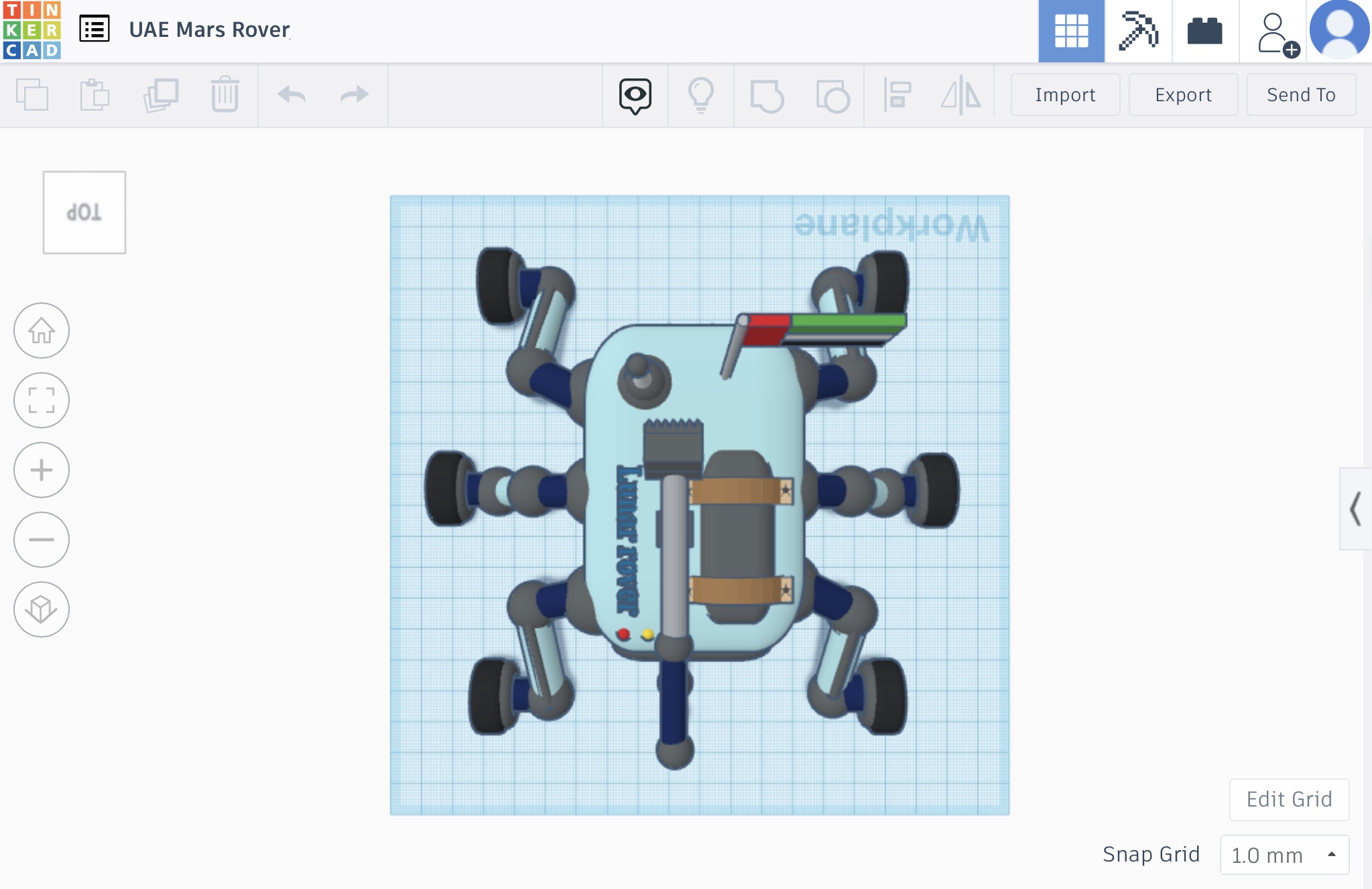
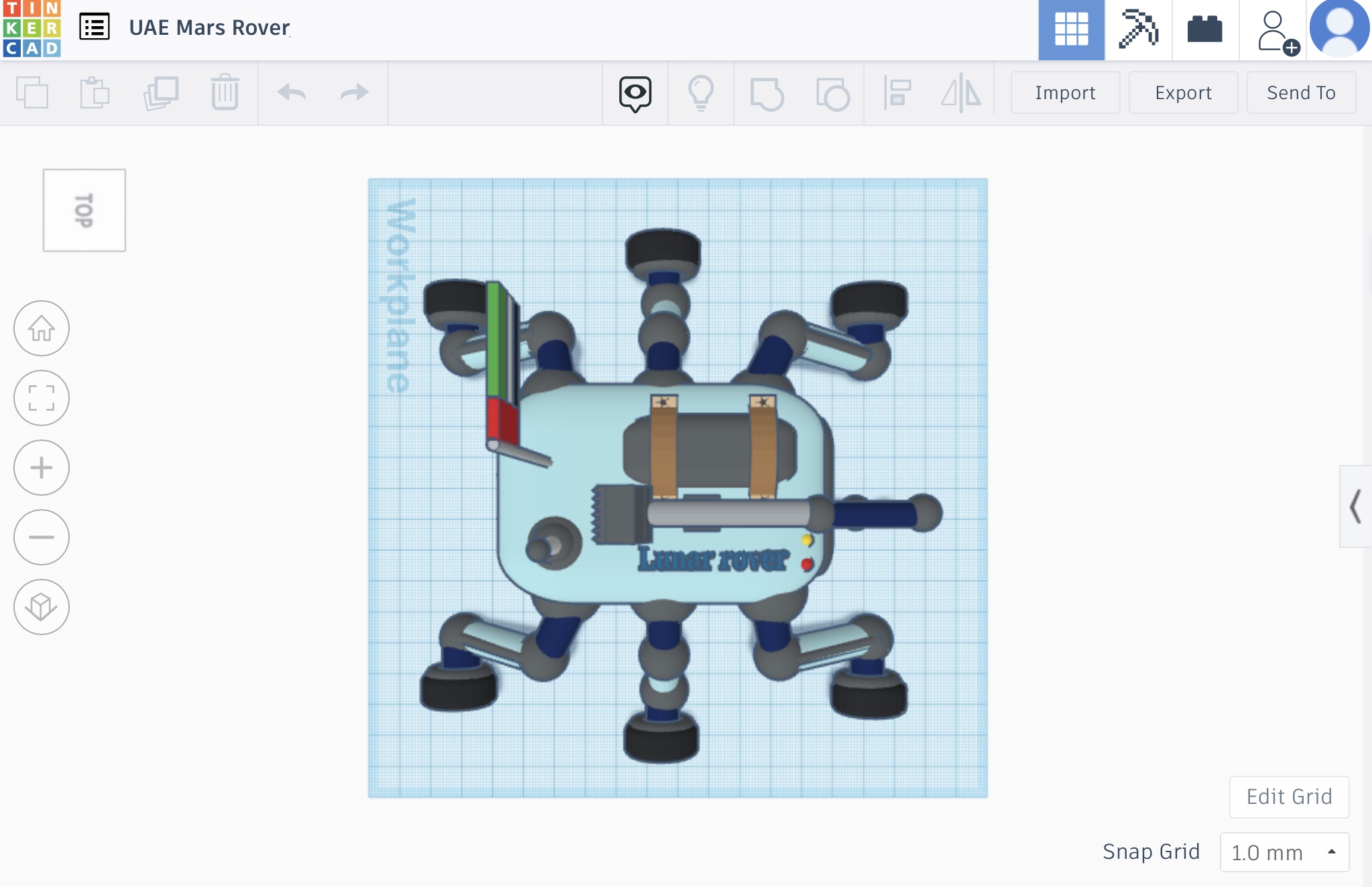
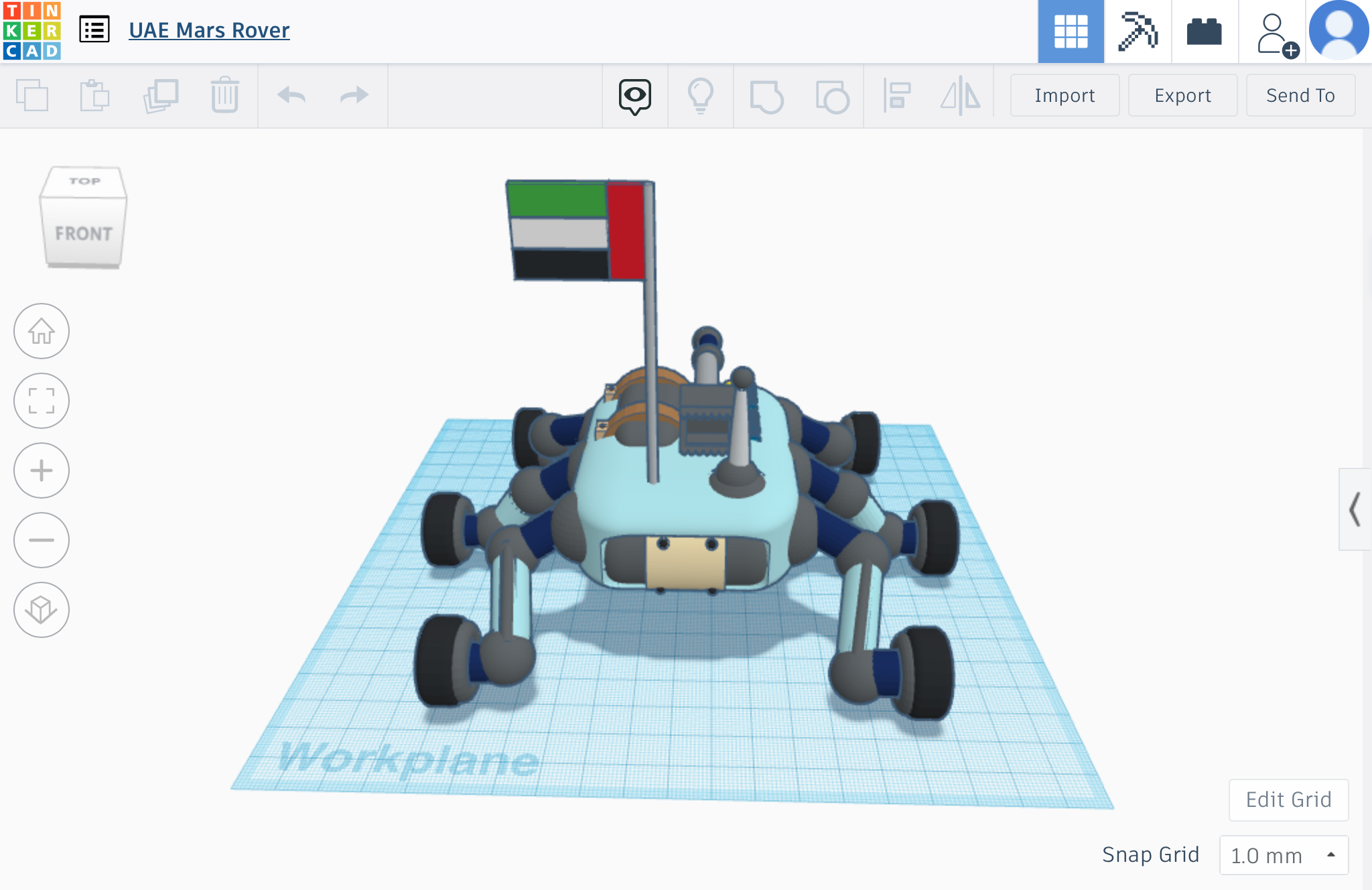
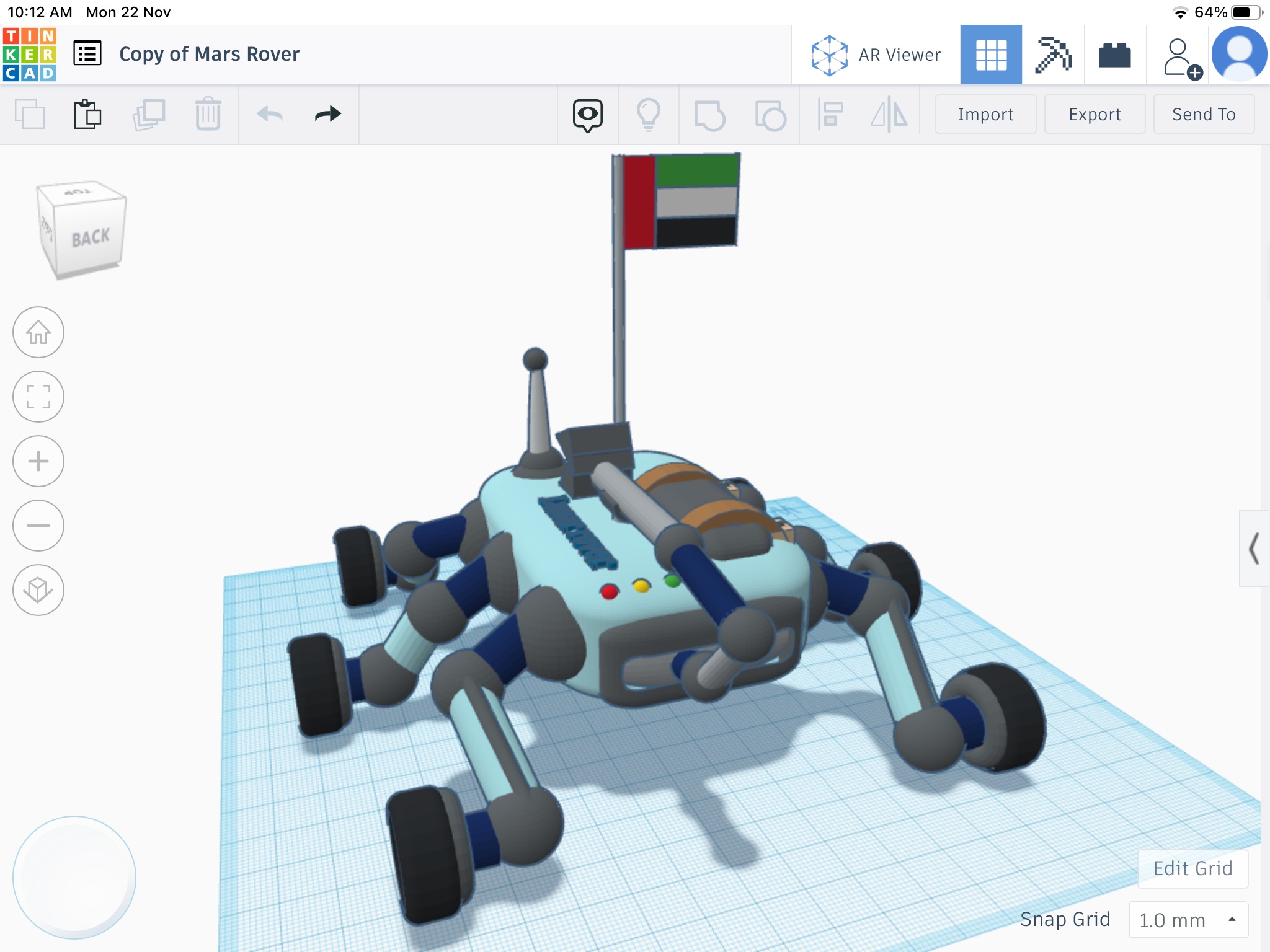
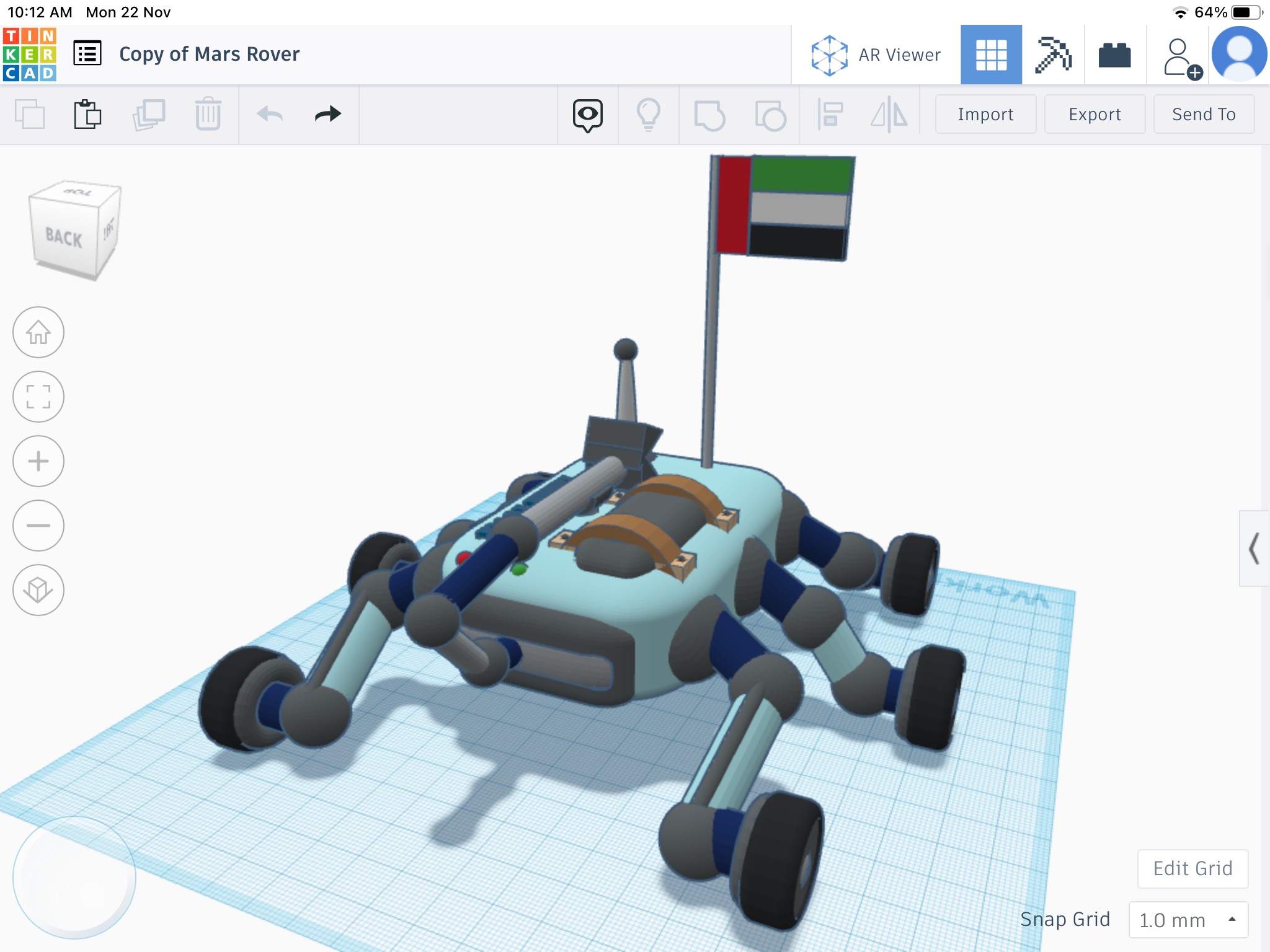
Moja stvaritev za projekt Moon Camp je lunarni rover. To idejo sem izbral, ker sem se zavedal neskončnih možnosti, ki jih je mogoče doseči, in nekonvencionalnih zamisli, ki bi jih lahko prišel na dan pri izdelavi in bi pomagale astronavtom preživeti na Luni. Moja stvaritev je sestavljena iz treh robotskih nog s trdimi in vzdržljivimi pnevmatikami, ki zagotavljajo učinkovitost njegovega dela, ne da bi se na poti pokvaril. Gibljejo se v polnem 360-stopinjskem obračanju. Vključil sem tudi lopato v obliki ročaja, ki se lahko iztegne navzgor in navzdol v gibanju levo, desno, navzgor in navzdol. S tem zagotovim, da lahko vzorce kamenja in peska odvzamete pod vsakim kotom, ne glede na strmino ali skalnatost območja. Na zgornji plasti lahko vidite 2 rjava ročaja, ki držita kovinsko cev, podobno škatli, v kateri je shranjena voda, ki se uporablja za poskuse z vzorci in iskanje združljivosti z vodo. Najpomembnejša uporaba moje stvaritve je za eksperimentiranje z viri hrane in vode z Zemlje ter iskanje združljivosti z lunarnimi viri, kot so kamnine. V roverju so shranjena preprosta živila, ki vsebujejo beljakovine, ogljikove hidrate in pravzaprav vse druge skupine živil, ki se uporabljajo za poskuse in analize. Moj projekt vključuje tudi anteno, ki se povezuje z zemeljskimi sateliti, tako da lahko ljudje na Zemlji spremljajo njegovo gibanje. Satelitski valovi se uporabljajo tudi za napajanje lunarnega roverja, kar pomaga astronavtom, saj lahko baterijo, ki bi jo uporabili za rover, uporabijo za druge potrebe. Moj lunarni rover ne potrebuje astronavta, ki bi ga vozil in delal z njim. Ker je robotski, bi imel nadzorno ploščo ali daljinski upravljalnik, tako da bi astronavti lahko opravljali svoje delo iz udobja svojega bivalnega prostora. To bi pomagalo tudi pri njihovi zaščiti. Imel bi več načinov hitrosti, tako da bi astronavti lahko delali hitreje ali počasneje, odvisno od njihovih želja. Zasnovan je bil za največjo hitrost 18 km/h (11,2 milje na uro). Če pa bi se morali odpraviti izven svoje baze in delati drugje, bi imel rover zasilno posodo za kisik, če bi šlo kaj narobe.
Drugi projekti:
..