
Moon Camp Discovery 2021-2022 Galerija projektov
Vse | Lunarno pristajalno vozilo | Baza na Luni | Lunarni rover | Raketa | Lunarna orbitalna vesoljska postaja| Vesoljske obleke
Team: Inxplorer
Kategorija: Lunarni rover | Kandy | Šrilanka | 1 | 14 let
Zunanja povezava za oblikovanje Tinkercad 3D


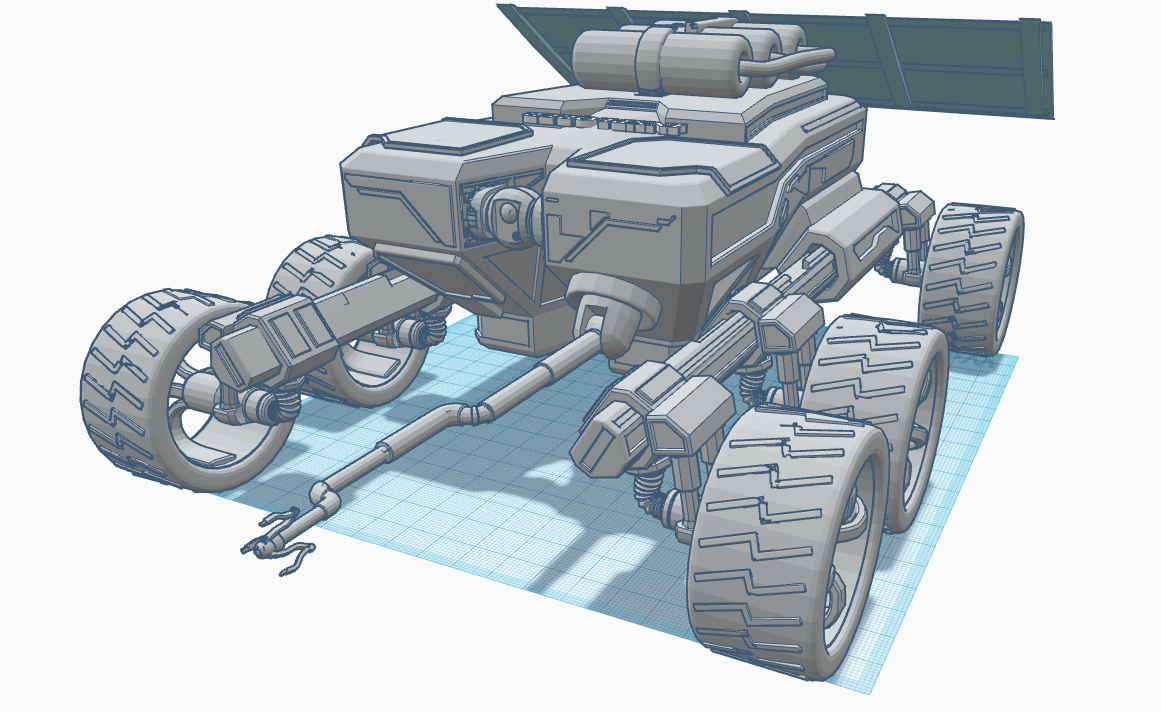
Inxplorer Rover
Družina petih večnamenskih roverjev v obliki črke U, zasnovanih za prenašanje znanstvenih instrumentov in tovora. Roverji Juno so bili uporabljeni v terenskih testih, ki jih je vodila NASA, na skalnatih pobočjih havajskega vulkana, da bi simulirali misije na Luno. Razviti so bili za zbiranje vzorcev z Lune, pridobivanje znanstvenih meritev in prikaz nalog, kot sta potovanje na dolge razdalje in preživetje ponoči.
Tehnične podrobnosti
| Ciljna destinacija | Luna |
| Velikost (dolžina, širina, višina) | 1,38 m x 1,6 m x 0,75 m (brez nameščenega jambora) |
| Masa | 250 kg |
| Lahko prenaša | 200 kg |
| Hitrost | Največja hitrost 12,5 km/h |
| Powered by | Električno napajanje (litij-ionske baterije) |
Poudarki
- Inxplorer lahko prevaža skoraj toliko, kot tehta, je presenetljivo hiter in okreten ter lahko vozi po vseh vrstah terena in velikih skalah. Poleg tega lahko vrtlje v skale, jemlje vzorce in opravlja analize kamnin s svojim mikroskopskim instrumentom visoke ločljivosti.
- Upravlja ga lahko človek v bližini ali pa sam pregleduje okolje in krmili. Ko opazi cilj, se lahko popolnoma avtonomni rover sam pripelje do lokacije, z robotsko roko izkoplje jarek, pobere vzorce in jih odloži v zbiralnici, ki sta na obeh njegovih "ramenih".
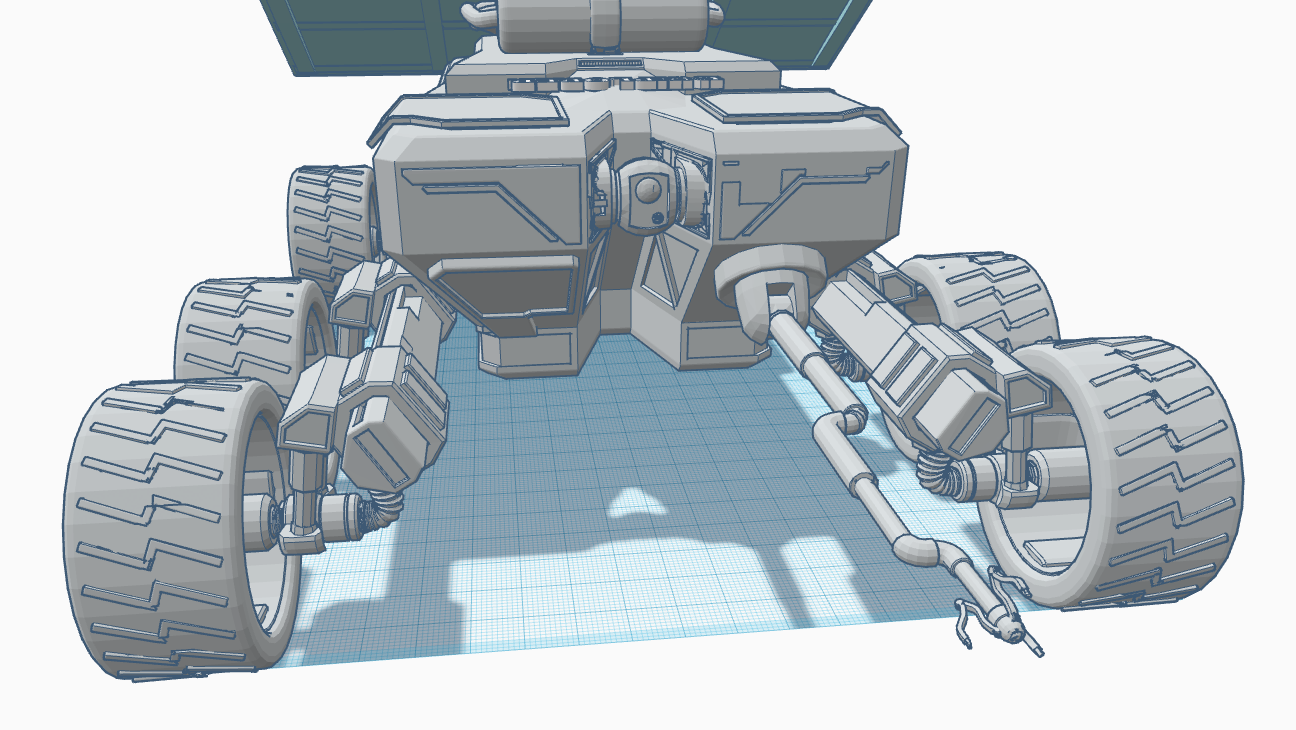
- 4-kolesni pogon z edinstvenim sistemom koles, ki omogoča vrtenje za 360 stopinj na istem mestu
- Njegova robotska roka, ki koplje, ima dvojno vlogo, in sicer kot jambor za senzorje, ki mu omogočajo pregledovanje in kartiranje okolja za iskanje mineralov, vode ali ledu.
- Ta Rover lahko z nočnim načinom brez težav vozi tudi ponoči. Rover ima dve glavni svetlobni in nočni kameri za visokokakovostne slike.
RAZISKOVANJE ZAHTEVA MOBILNOST
Raziskovanje zahteva mobilnost. Ne glede na to, ali ste na Zemlji ali tako daleč, kot sta Luna ali Mars, potrebujete dobre pnevmatike, da se z vozilom premaknete z enega kraja na drugega.
Kolesa na Luni
Trije glavni zasnove koles so uvedli NASA in drugi mednarodni raziskovalci za zgodnje raziskovanje. Čeprav so se med seboj zelo razlikovali, so bili vsi osredotočeni na premikanje strojne opreme in astronavtov po luninem površju.
Spomladanska pnevmatika
Tudi rover Inxplorer lahko prilagodi dolžino osi in se pelje mimo skal in majhnih jam.
Arhitektura pnevmatik
Medtem ko so se pri zgodnjih zasnovah pnevmatik uporabljale tkane žice, so zdaj pnevmatike z vzmetmi narejene iz več med seboj povezanih tuljav. Tehtajo približno 20 kg in prenesejo 165 kg obremenitve. Upamo, da bomo ta kolesa uporabili za Rover.
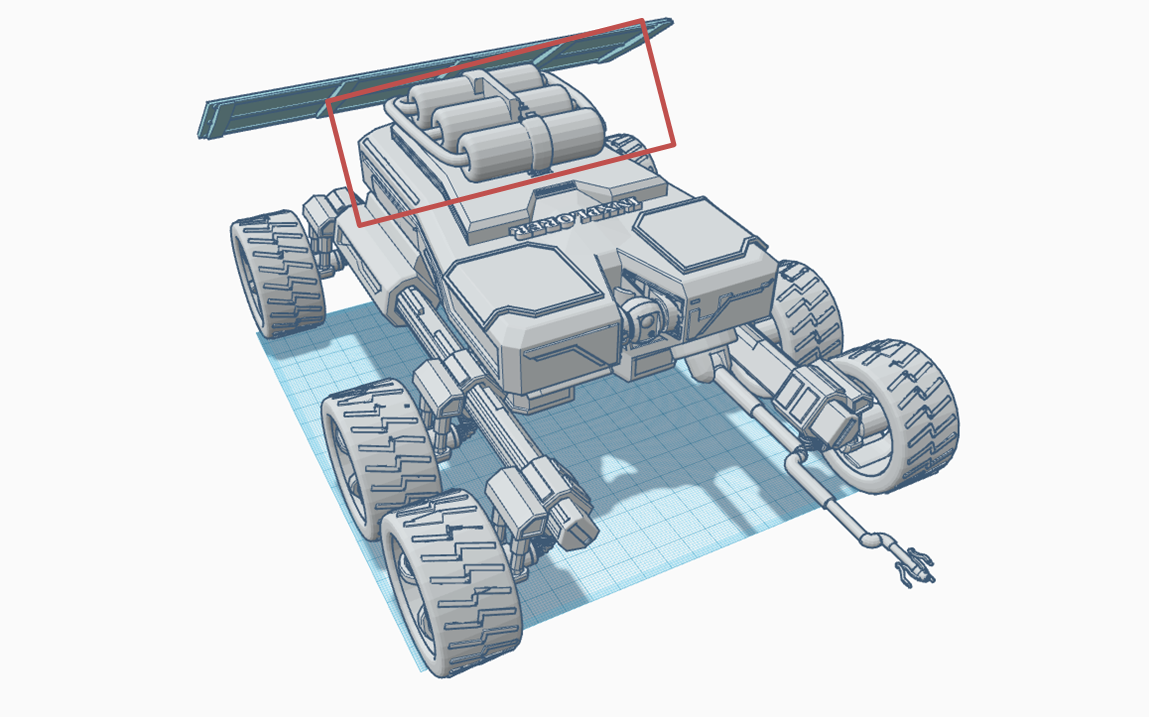
Instrument ISRU
Kot ekipa Inxpolrer, Ne pozabimo dodati ISRU del za naš Rover. Ta del lahko vključuje pridobivanje kovin za gradbeni material v vesolju, kar je lahko stroškovno učinkovitejše od pridobivanja takšnega materiala iz globoke gravitacijske jame Zemlje ali katerega koli drugega velikega telesa, kot sta Luna ali Mars.
Lokacije
Luna
Na Luni je veliko surovin, ki so potencialno pomembne za hierarhijo prihodnjih aplikacij, začenši z uporabo lunarnih materialov za olajšanje človeških dejavnosti na Luni sami in nadaljevanjem z uporabo lunarnih virov za podporo prihodnjim industrijskim zmogljivostim v sistemu Zemlja-Mona. Naravni viri vključujejo sončno energijo, kisik, vodo, vodik in kovine. Anortit iz luninega višavja se lahko uporablja kot aluminijeva ruda. V talilnicah lahko iz anortita pridobivajo čisti aluminij, kovinski kalcij, kisik in silicijevo steklo. Surov anortit je primeren tudi za izdelavo steklenih vlaken ter drugih steklenih in keramičnih izdelkov. Posebna tehnika predelave je uporaba fluora, ki ga prinesejo z Zemlje v obliki kalijevega fluorida, za ločevanje surovin od lunarnih kamnin. Za pridobivanje kisika iz luninega regolita je bilo predlaganih več kot dvajset različnih metod. Kisik je pogosto prisoten v luninih mineralih in steklu, bogatih z železom, kot železov oksid. Kisik je mogoče pridobiti s segrevanjem materiala na temperaturo nad 900 °C in izpostavitvijo plinastemu vodiku. Osnovna enačba je: FeO + H2 → Fe + H2O. Ta postopek je postal veliko bolj praktičen, saj je sonda Clementine nedavno odkrila velike količine regolita, ki vsebuje vodik, v bližini Luninih polov. Lunarni materiali se lahko uporabljajo tudi kot splošni gradbeni material. s tehnikami predelave, kot so sintranje, vroče stiskanje, utekočinjenje in metoda litega bazalta. Liti bazalt se na Zemlji uporablja za gradnjo na primer cevi, pri katerih je potrebna visoka odpornost proti obrabi. Steklo in . steklena vlakna se na Luni in Marsu enostavno obdelujejo. Bazaltna vlakna so bila izdelana tudi iz simulatorjev lunarnega regolita.
Na Zemlji so bili opravljeni uspešni testi z dvema simulantoma lunarnega regolita MLS-1 in MLS-2. Avgusta 2005 je NASA naročila izdelavo 16 ton simulirane lunine zemlje ali simulacijskega materiala luninega regolita za raziskave, kako bi lahko uporabili lunino zemljo. in situ.
Razvrstitev zmogljivosti ISRU pri raziskovalcu Inxplorer Rover
- črpanje virov.
- ravnanje z materialom in prevoz
- površinska izdelava z in situviri
- površinska konstrukcija
- skladiščenje in distribucija izdelkov in potrošnega materiala ISRU na površini.
- Edinstvene razvojne in certifikacijske zmogljivosti ISRU
Drugi deli
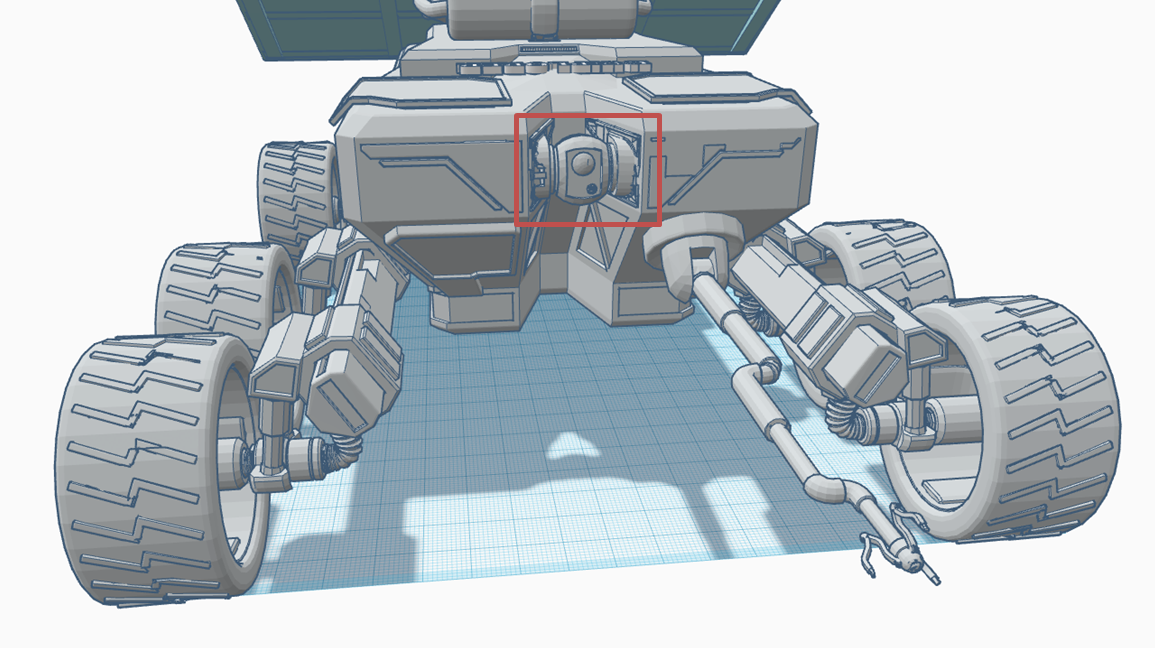
Kamere
"Oči" in drugi "čuti" vozila rover
Na roverju Perseverance je več kamer, ki se osredotočajo na inženirske in znanstvene naloge. Nekatere nam pomagajo pristati na Marsu, druge pa nam služijo kot "oči" na površju za vožnjo po njem. Druge uporabljamo za znanstvena opazovanja in pomoč pri zbiranju vzorcev.
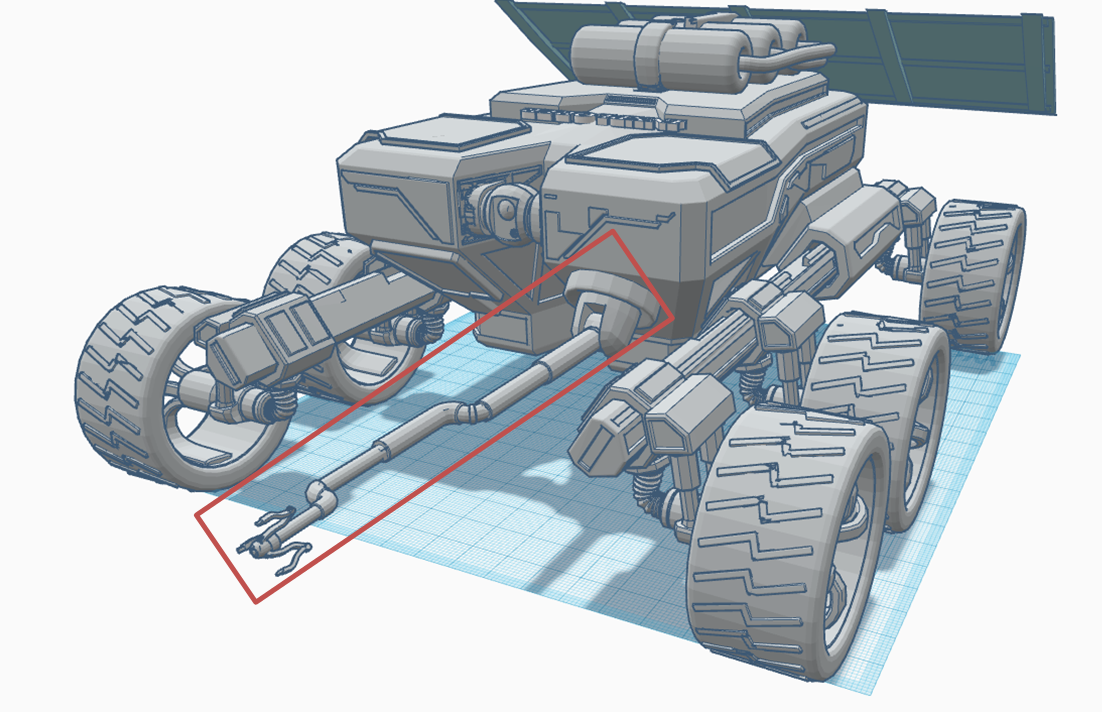
Robotska roka
Tri metre dolga robotska roka na napravi Inxplorer se lahko premika podobno kot vaša. Prav tako lahko njeno dolžino povečamo na 6 čevljev. Ima ramenski, komolčni in zapestni "sklep" za čim večjo prilagodljivost. Roka omogoča, da rover deluje tako, kot bi deloval človeški geolog: tako, da s svojo "roko" ali vežo drži in uporablja znanstvena orodja. Roverjeva "ročna orodja" iz kamnin pridobivajo jedra, izdelujejo mikroskopske slike ter analizirajo elementno sestavo in mineralno sestavo Luninih kamnin in tal.
Tehnične specifikacije
Dolžina: 6 čevljev (1,8 metra)
Imena orodij na stolpu: SHERLOC in WATSON, PIXL, GDRT (orodje za odstranjevanje plinastega prahu), senzor za stik s tlemi, vrtalnik
Vaja: Vrtalnik je rotacijski udarni vrtalnik, namenjen pridobivanju vzorcev kamnitih jeder s površine Marsa.
Vrtalni nastavki: Sklop zamenljivih nastavkov: nastavki za vrtanje, nastavek za regolit in brusilnik.
Glavna funkcija: Pomoč pri raziskovanju površja Marsa in zbiranju vzorcev
Premer izvrtanih lukenj:1 palec (27 mm)
Vrtalnik
Vrtalnik roverja bo z rotacijskim gibanjem z udarci ali brez njih prodrl v marsovsko površje in zbral dragocene vzorce. Vrtalnik je opremljen s tremi različnimi vrstami nastavkov (bitov), ki olajšajo pridobivanje vzorcev in analizo površine. Nastavka za vrtanje in nastavka za regolit se uporabljata za zbiranje marsovskih vzorcev neposredno v čisto cev za zbiranje vzorcev, medtem ko se nastavek za abrazijo uporablja za strganje ali "strganje" vrhnjih plasti kamnin, da se razkrijejo sveže, nezvetrene površine za preučevanje.
Vrste vzorcev kamnin, ki jih bo vrtalnik zbral
Rock vzorci
Cilindrični vrtalnik odreže vzorce iz notranjosti kamnin, pri čemer se vzorec kamnine odlomi na dnu.
Oprema za vzorčenje na "roki" (turret)
Na koncu roke se nahaja "stolp". To je kot roka, ki nosi znanstvene kamere, analizatorje mineralov in kemičnih snovi za preučevanje pretekle naseljenosti Marsa in izbiro znanstveno najbolj dragocenega vzorca, ki ga je treba shraniti.
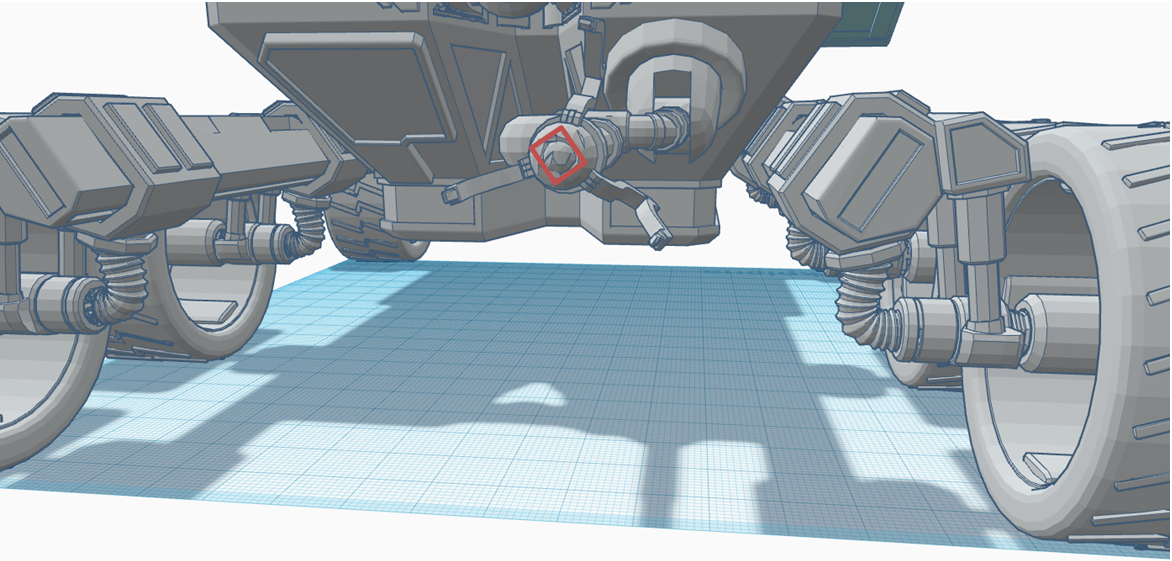
Senzor zemeljskega stika
Vratar je opremljen s posebnim senzorjem, ki ščiti pred poškodbami, če se roka dotakne površine. Senzor stika signalizira, da se roka roverja ustavi, če se nenamerno dotakne tal.
Ravnanje z vzorci
Inxplorer bo zajel vzorce Luninih kamnin in zemlje. Z vrtalnikom bo zbiral in shranil jedra v ceveh na površini Lune.
Nadzor temperature
Da bi rover preživel v vseh fazah misije, njegovi "vitalni organi" ne smejo preseči ekstremnih temperatur od -173°(-280° Fahrenheita do) Celzija do +127° Celzija (260° Fahrenheita).
Najnujnejši deli roverja, kot so baterije, elektronika in računalnik, ki so pravzaprav srce in možgani roverja, ostanejo na varnem v topli elektronski škatli (WEB), ki jo običajno imenujemo "telo roverja". V telesu roverja so nameščeni grelniki, ki kot topel plašč pomagajo ohranjati toploto, ko se nočne temperature na Luni spustijo do -173° Celzija (-° Fahrenheita). Podobno kot se športnik po intenzivni vadbi znoji, da bi sprostil toploto, lahko tudi telo roverja odvečno toploto sprošča prek radiatorjev, podobnih tistim, ki se uporabljajo v avtomobilskih motorjih.
Raziskovalec: Rover: Deli za Rover
Rover ima:
| telo: | struktura, ki ščiti "vitalne organe" roverjev. |
| možgani: | računalniki za obdelavo informacij. |
| nadzor temperature: | notranji grelniki, plast izolacije in še več. |
| "vrat in glava": | jambor za kamere, ki omogoča pogled na roverje v človeškem merilu. |
| oči in drugi čuti.: | kamere in instrumenti, s katerimi roverji pridobivajo informacije o svojem okolju. |
| roka: | način za razširitev njenega dosega. |
| kolesa in "noge": | deli za mobilnost |
| energija: | baterije in sončne celice. |
| komunikacije: | antene za "govorjenje" in "poslušanje" |
Drugi projekti:
..