3D Printed Wheels for Regolith by Pinewood Panthers
Pinewood American International School Thessaloniki Thessaloniki-Thessaloniki Kreeka 14 aastat vana 4 / 2 Inglise keeles Moon
Projekti kirjeldus
Kosmosemissioonid hõlmavad seadmete ja ressursside ülekandmist Maalt, mis suurendab missioonide kulusid. Paljude selliste missioonide oluliseks osaks on maastikuautod, mille osad võivad kahjustuda ja vajavad väljavahetamist. Curiosity ränduri rataste ulatuslikud kahjustused on silmapaistev näide. Tulevaste missioonide puhul on Kuu uurimisel otstarbekas kasutada kohalikke ressursse, eelkõige Kuu regoliiti, seadmete ja varuosade 3D-printimiseks. Teadlased plaanivad juba praegu kasutada 3D-printimist tulevastel Kuu missioonidel. Meie projektis töötasime välja 3D-trükitud rattad, mis on kohandatud Kuu roomikutele, parandades nende võimet läbida suuremaid vahemaid väiksema energiatarbimisega. Meie ratta disaini võiks kasutada ka rannapuhastusvankrites. Selleks töötasime välja rannapuhastuse 3D-trükitud osakesed, mis kohandati meie liikurile.
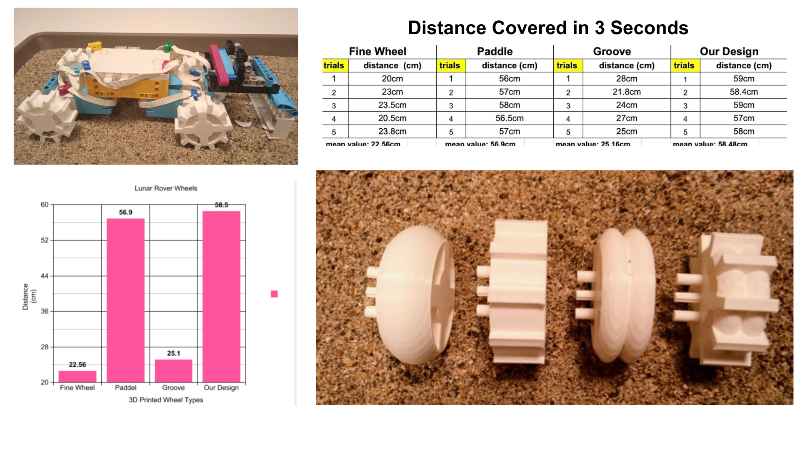
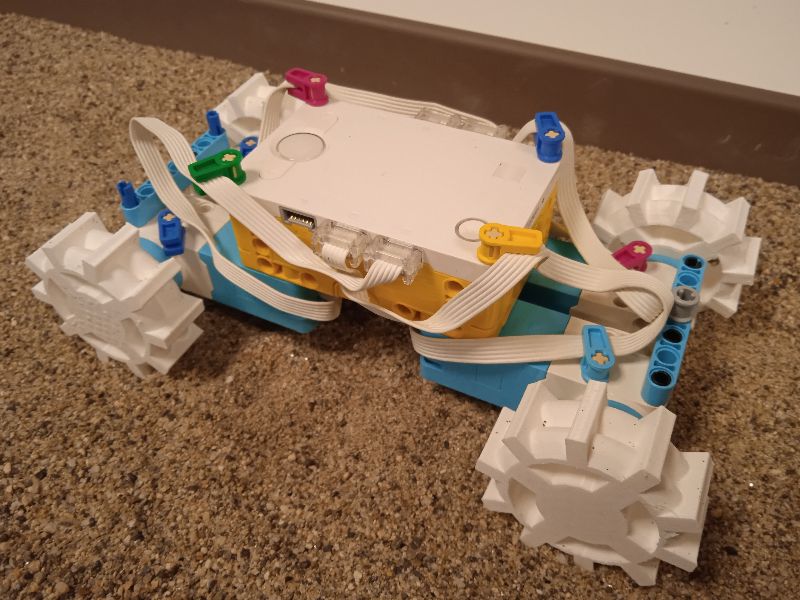
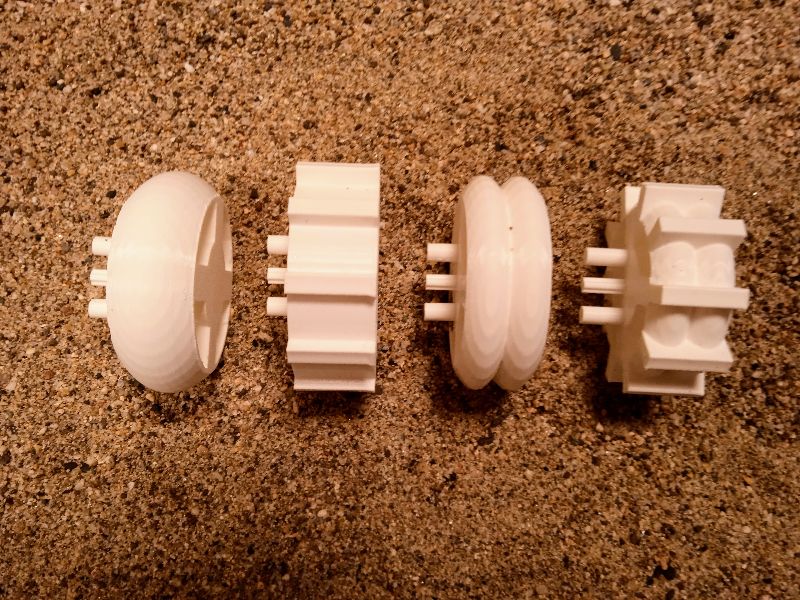
Meie lahendus kasutada regoliidi 3D-printitud rattaid põhines kahel juba olemasoleval ratta disainil, kasutades soonte ja labidaid. Rataste funktsioon põhineb Newtoni 3. seadusel. See seadus sätestab, et igale toimele vastab võrdne ja vastupidine reaktsioon. Kui sõiduki rattad suruvad vastu liiva, surub liiv võrdse jõuga vastassuunas tagasi. Ratta soonte funktsioon põhineb kokkupuutepinna maksimeerimisel. Suurem kokkupuutepind loob suurema hõõrdumise ratta ja maapinna vahel, mis toob kaasa suurema veojõu ja haardumise. Meie eesmärk oli luua konstruktsioon, mis ühendab nende kahe ratta põhimõtted, et saada kiirem ja paremini toimiv rover. Et veenduda, et me saavutasime oma eesmärgi, pidime neid katsetama. Meie testimismeetodiks rakendasime erinevaid rattaprojekte roverile ja programmeerisime mootori liikuma standardkiirusega (75%) 3 sekundiks. Katsetusaluseks oli peene liivaga simuleeritud regoliit. Kasutasime nelja erinevat ratta konstruktsiooni. Peene pinnaga ratas, labidas, soon ja meie konstruktsioon. Kõigi rataste läbimõõt jäi samaks 57 cm ja kõigi rataste laius oli 2 cm. Täpsete tulemuste tagamiseks katsetasime iga ratast viis korda, mõõtes alguspunktist kuni lõpp-punktini. Kõige vähem õnnestus meie rattaga peenliivaga ratas, mis läbis vaid 22,4 cm (keskmine). Meie kõige edukam ratas oli meie konstruktsioon, mis kombineeris labidad ja sooned, läbides 58,5 cm.
#3D printimine #Robootika
Muud projektid
Rover lunar basados en la biónica Esteban Arzuza