3D Printed Wheels for Regolith by Pinewood Panthers
Pinewood American International School Salónica Tessalónica-Tessalónica Grécia 14 anos de idade 4 / 2 Inglês Lua
Descrição do projecto
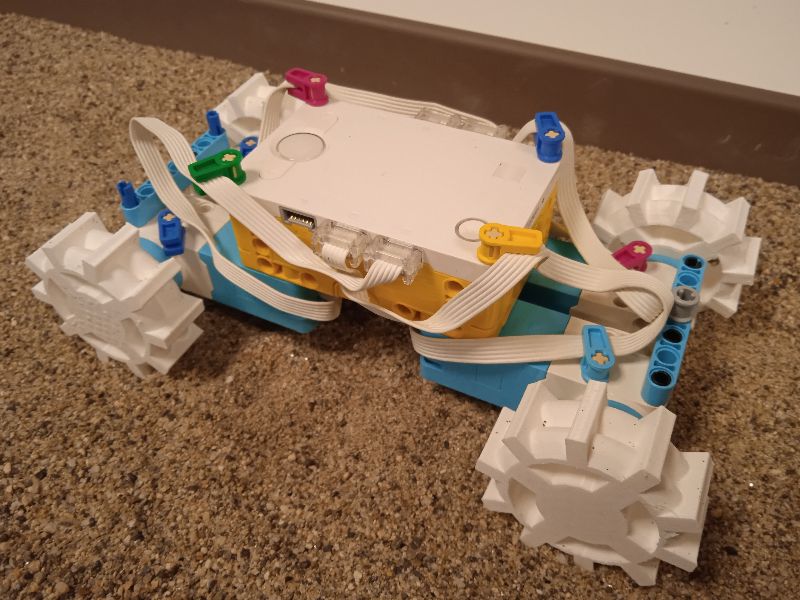
As missões espaciais implicam a transferência de equipamento e recursos da Terra, o que aumenta o custo das missões. Um componente importante de muitas destas missões são os rovers, cujas peças estão sujeitas a danos e precisam de ser substituídas. Os danos extensos nas rodas do rover Curiosity são um exemplo proeminente. Especificamente para a exploração da Lua, uma solução viável para futuras missões inclui a utilização de recursos locais, nomeadamente o regolito lunar, para a impressão 3D de equipamento e peças de substituição. Os cientistas já estão a planear a utilização da impressão 3D em futuras missões lunares. No nosso projeto, desenvolvemos rodas impressas em 3D adaptadas aos rovers lunares, melhorando a sua capacidade de percorrer maiores distâncias com um consumo de energia reduzido. O design da nossa roda também pode ser utilizado em rovers de limpeza de praias. Para este efeito, desenvolvemos uma partícula impressa em 3D para limpeza de praias que foi adaptada ao nosso rover.
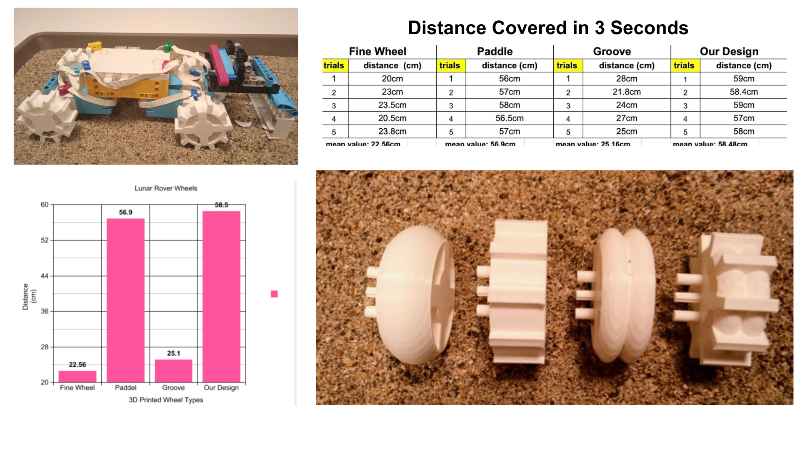
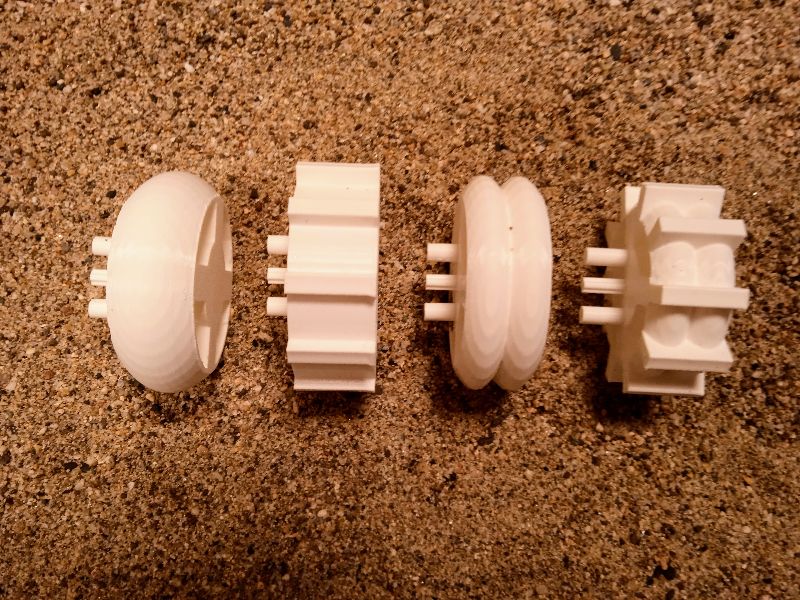
A nossa solução para utilizar rodas impressas em 3D no regolito baseou-se em dois modelos de rodas já existentes, utilizando ranhuras e pás. A função da roda de pás baseia-se na 3ª Lei de Newton. Esta lei afirma que, para cada ação, há uma reação igual e oposta. Quando as rodas de um veículo empurram a areia, esta empurra-a de volta com uma força igual na direção oposta. A função da roda de sulco baseia-se na maximização da superfície de contacto. O aumento da área de contacto cria mais fricção entre a roda e o solo, levando a uma maior tração e aderência. O nosso objetivo era criar um design que combinasse os princípios destas duas rodas, de modo a obter um rover mais rápido e com melhor funcionamento. Para termos a certeza de que cumprimos a nossa missão, tivemos de as testar. Para o nosso método de teste, aplicámos os diferentes designs de rodas no rover e programámos o motor para se mover a uma velocidade padrão (75%) durante 3 segundos. O terreno de teste era de areia fina que simulava o regolito. Utilizámos quatro modelos de rodas diferentes. A roda de superfície fina, a pá, a ranhura e o nosso projeto. O diâmetro de todas as rodas permaneceu o mesmo, 57 cm, e a largura de todas as rodas foi de 2 cm. Para garantir resultados precisos, testámos cada roda cinco vezes, medindo o ponto de partida até ao ponto de paragem. A roda menos bem sucedida foi a roda de areia fina, que percorreu apenas 22,4 cm (média). A roda mais bem sucedida foi a nossa conceção que combinava pás com uma ranhura, percorrendo 58,5 cm
#Impressão em 3D #Robótica
Outros projectos