3D Printed Wheels for Regolith by Pinewood Panthers
Pinewood American International School Thessaloniki Thessaloniki-Thessaloniki Greece 14 years old 4 / 2 English Moon
Project description
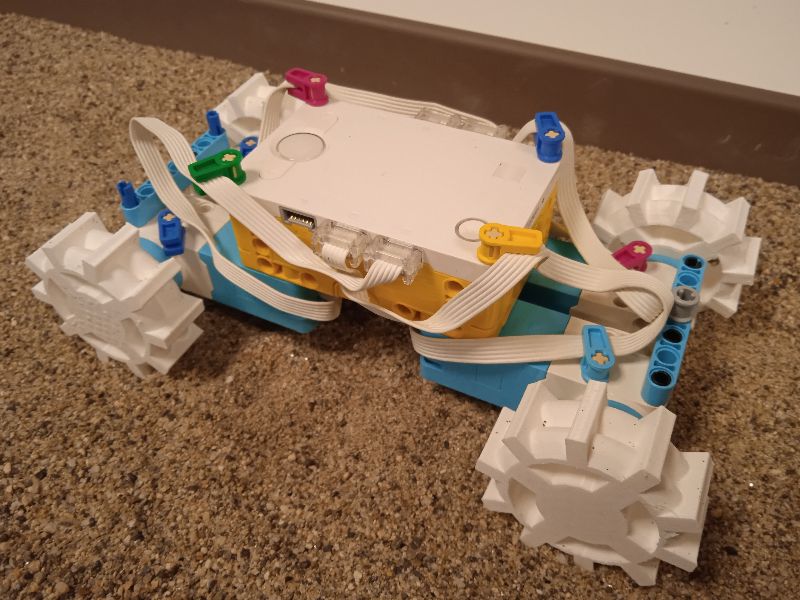
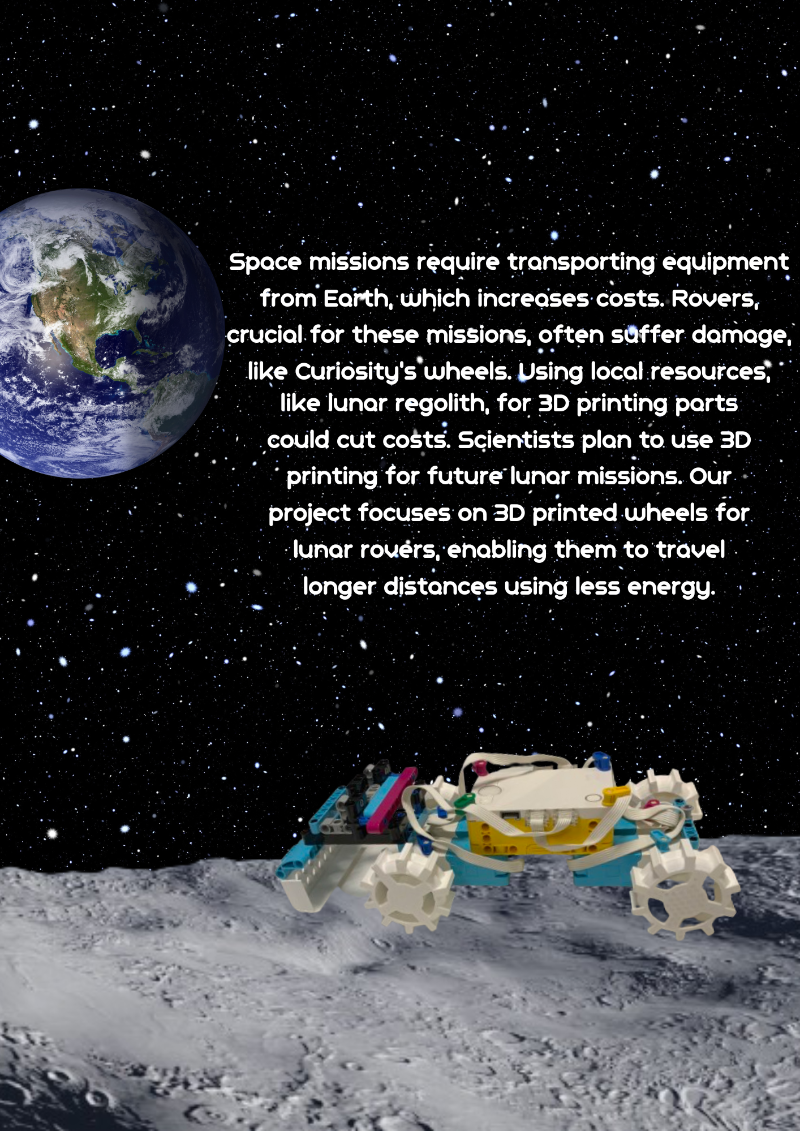
Space missions involve the transfer of equipment and resources from Earth, something that increases the cost of the missions. An important component of many of these missions are rovers, whose parts are prone to damage and need replacement. The extensive damage to the wheels of the Curiosity rover serves as a prominent example. Specifically for moon exploration, a viable solution for future missions includes the use of local resources, particularly lunar regolith, for the 3D printing of equipment and replacement parts. Scientists already are planning to use 3D printing in future lunar missions. In our project, we developed 3D printed wheels tailored for lunar rovers, improving their capacity to cover greater distances with reduced energy consumption. Our wheel design could also be used in beach cleaning rovers. For this purpose we developed a beach cleaning 3D printed particle that was adapted on our rover.
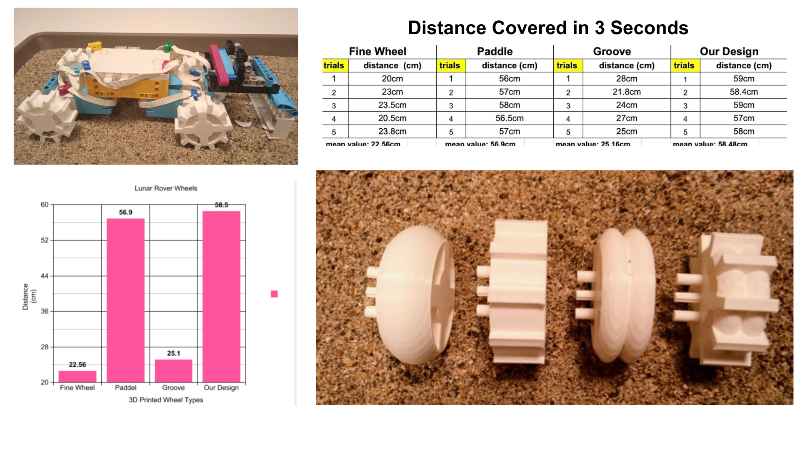
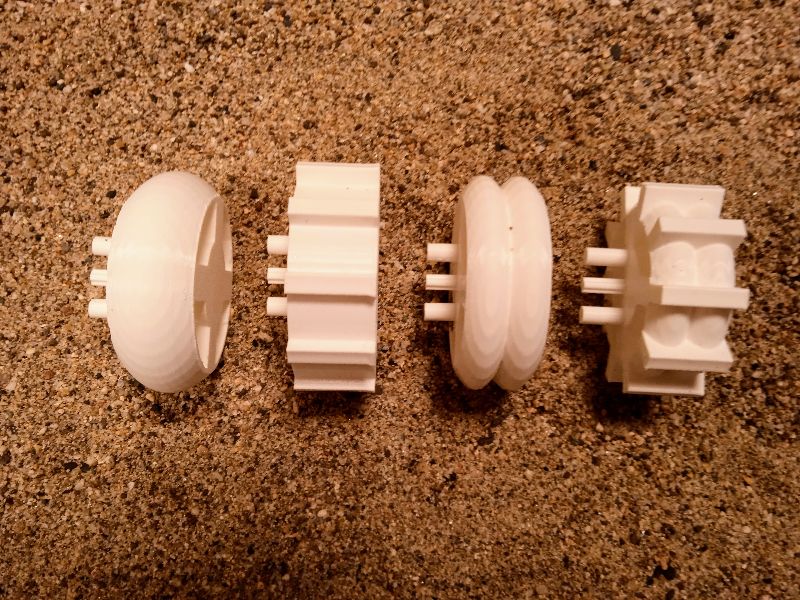
Our solution to use regolith 3D printed wheels was based on two already existing wheel designs, using grooves and paddles . The paddle wheel function is based on Newton’s 3rd Law. This law states that for every action, there is an equal and opposite reaction. As the wheels of a vehicle push against the sand, the sand pushes back with an equal force in the opposite direction. The groove wheel function is based on maximizing the contact surface. The increased contact area creates more friction between the wheel and the ground, leading to more traction and grip. Our aim was to create a design combining the principles of these two wheels in order to have a faster, and better operating rover. To make sure we achieved our mission we had to test them. For our testing method we applied the different wheel designs on the rover and programmed the motor to move with a standard speed (75%) for 3 seconds. The testing ground was fine sand simulating regolith. We used four different wheel designs. The fine surface wheel, the paddle, the groove, and our design. The diameter of all the wheels stayed the same at 57cm, and the width of all wheels was 2cm. To ensure accurate results we tested each wheel five times, measuring the starting point to the stopping point. Our least successful wheel was the fine sand wheel, traveling only 22.4cm (mean). Our most successful wheel was our design that combined paddles with a groove, traveling 58.5cm
#3D Printing #Robotics
Other Projects
Baza kolonialna na Marsie
Volvo FMX 3098 – space edition
Habitats in space – Design on Paint
stockton – United Kingdom