

Moon Camp Discovery 2021-2022 Galería de proyectos
Todo | Aterrizaje lunar | Base Lunar | Vehículo lunar | Cohete | Estación espacial orbital lunar | Traje espacial
Equipo: Inxplorer
Categoría: Rover lunar | Kandy | Sri Lanka | 1 | 14 años
Enlace externo para el diseño en 3D de Tinkercad


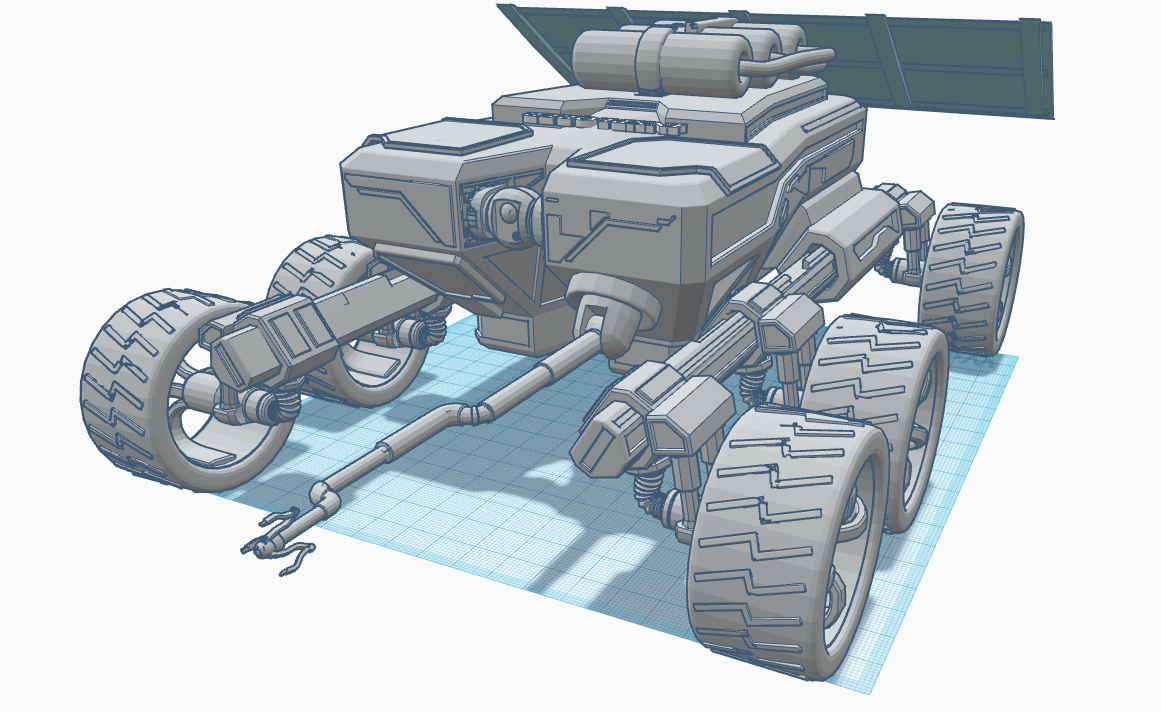
Inxplorer Rover
Familia de cinco rovers polivalentes en forma de U diseñados para transportar instrumentos científicos y cargas útiles. Los rovers Juno se utilizaron en pruebas de campo dirigidas por la NASA en las laderas rocosas de un volcán hawaiano para simular misiones a la Luna. Se desarrolló para recoger muestras de la Luna, realizar mediciones científicas y demostrar tareas como los viajes de larga distancia y la supervivencia nocturna.
Detalles técnicos
| Destino de la inversión | Luna |
| Tamaño (longitud, anchura, altura) | 1,38 m x 1,6 m x 0,75 m (sin la opción de mástil instalada) |
| Masa | 250 kg |
| Puede llevar | 200 kg |
| Velocidad | 12,5 km/h de velocidad máxima |
| Desarrollado por | Energía eléctrica (baterías de iones de litio) |
Destacados
- Inxplorer puede transportar casi tanto como pesa, es sorprendentemente rápido y ágil y puede circular por todo tipo de terrenos y grandes rocas. Y puede perforar rocas, tomar muestras y realizar análisis de rocas con su instrumento de microscopio de alta definición.
- Puede ser operado por un humano cercano o escanear su entorno y navegar por sí mismo. Una vez que localiza un objetivo, el rover totalmente autónomo puede conducirse hasta el lugar, utilizar su brazo robótico para cavar una zanja, recoger muestras y depositarlas en los botes de recogida situados en cualquiera de sus "hombros"
- Tracción a las 4 ruedas con un sistema único de ruedas que le permite girar 360 grados sobre el mismo punto
- Su brazo robótico excavador hace la doble función de mástil para los sensores que le permiten escanear y cartografiar su entorno para buscar minerales, agua o hielo
- Este Rover también puede conducir fácilmente en la noche con el modo nocturno. El Rover tiene dos cámaras de luz principal y nocturna para obtener imágenes de alta calidad.
LA EXPLORACIÓN REQUIERE MOVILIDAD
La exploración requiere movilidad. Y tanto si estás en la Tierra como en lugares tan lejanos como la Luna o Marte, necesitas unos buenos neumáticos para llevar tu vehículo de un lugar a otro.
Ruedas en la Luna
Tres grandes diseños de ruedas fueron introducidos por la NASA y otros investigadores internacionales para las primeras exploraciones. Aunque eran muy diferentes, todos se centraban en el traslado de equipos y astronautas por la superficie lunar.
Neumáticos de primavera
También el rover Inxplorer puede ajustar la longitud de su eje y pasar por las rocas y los pequeños pozos.
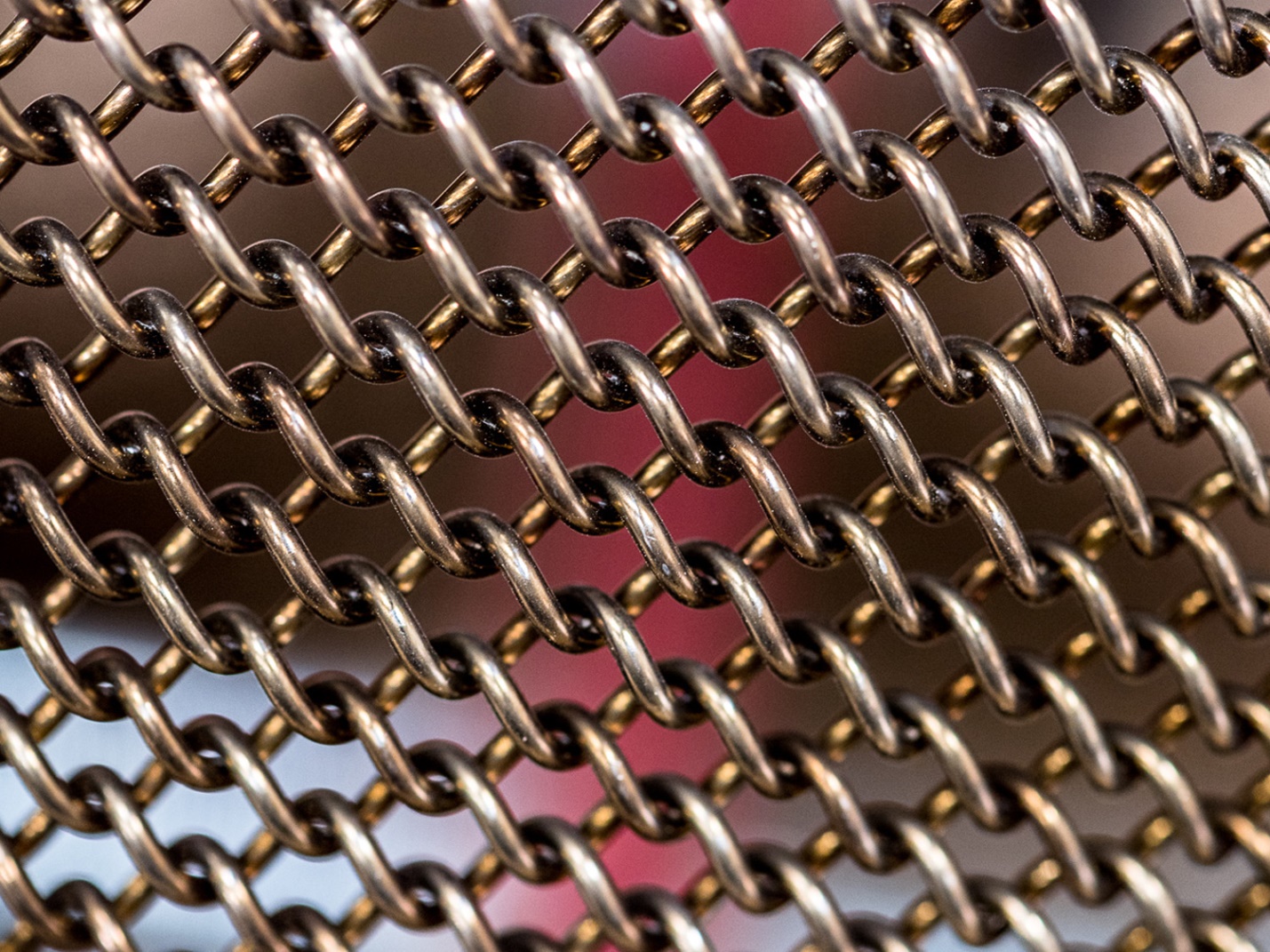
Arquitectura de los neumáticos
Mientras que los primeros diseños de neumáticos utilizaban alambre tejido, nosotros utilizamos neumáticos de muelle que se fabrican con una serie de bobinas interconectadas. Pesan unas 20 libras y pueden soportar 165 libras de carga. Esperamos utilizar estas Ruedas para Rover.
Instrumento ISRU
Como equipo de Inxpolrer, no olvidamos añadir una parte ISRU para nuestro Rover. Esta parte puede implicar la extracción de metales para material de construcción en el espacio, lo que puede ser más rentable que sacar dicho material del pozo de gravedad profundo de la Tierra, o de cualquier otro cuerpo grande como la Luna o Marte.
Ubicaciones
Luna
La Luna posee abundantes materias primas que son potencialmente relevantes para una jerarquía de aplicaciones futuras, empezando por el uso de materiales lunares para facilitar las actividades humanas en la propia Luna y progresando hasta el uso de recursos lunares para apuntalar una futura capacidad industrial dentro del sistema Tierra-Luna. Los recursos naturales incluyen la energía solar, el oxígeno, el agua, el hidrógeno y los metales. El material de las tierras altas lunares, la anortita, puede utilizarse como mineral de aluminio. Las fundiciones pueden producir aluminio puro, calcio metálico, oxígeno y vidrio de sílice a partir de la anortita. La anortita en bruto también es buena para fabricar fibra de vidrio y otros productos de vidrio y cerámica. Una técnica particular de procesamiento consiste en utilizar el flúor traído de la Tierra como fluoruro de potasio para separar las materias primas de las rocas lunares. Se han propuesto más de veinte métodos diferentes para la extracción de oxígeno del regolito lunar. El oxígeno se encuentra a menudo en los minerales y vidrios lunares ricos en hierro en forma de óxido de hierro. El oxígeno puede extraerse calentando el material a temperaturas superiores a 900 °C y exponiéndolo al gas hidrógeno. La ecuación básica es FeO + H2 → Fe + H2O. Este proceso se ha hecho mucho más práctico recientemente con el descubrimiento de cantidades significativas de regolito que contiene hidrógeno cerca de los polos de la Luna por parte de la nave espacial Clementine. Los materiales lunares también pueden utilizarse como material de construcción en general. mediante técnicas de procesamiento como sinterizaciónEl basalto fundido se utiliza en la Tierra para construir, por ejemplo, tuberías en las que se requiere una gran resistencia a la abrasión. El basalto fundido se utiliza en la Tierra para la construcción de, por ejemplo, tuberías en las que se requiere una gran resistencia a la abrasión. Vidrio y fibra de vidrio son fáciles de procesar en la Luna y Marte. También se ha fabricado fibra de basalto a partir de simuladores de regolito lunar.
Se han realizado pruebas con éxito en la Tierra utilizando dos simuladores de regolito lunar MLS-1 y MLS-2. En agosto de 2005, la NASA contrató la producción de 16 toneladas de suelo lunar simulado, o material simulador de regolito lunar para la investigación sobre cómo podría utilizarse el suelo lunar in situ.
Clasificación de la capacidad ISRU del Inxplorer Rover
- extracción de recursos
- manipulación y transporte de materiales
- fabricación de superficies con in siturecursos
- construcción de la superficie
- almacenamiento y distribución de productos y consumibles de ISRU en superficie
- Capacidades únicas de desarrollo y certificación de ISRU
Otras piezas
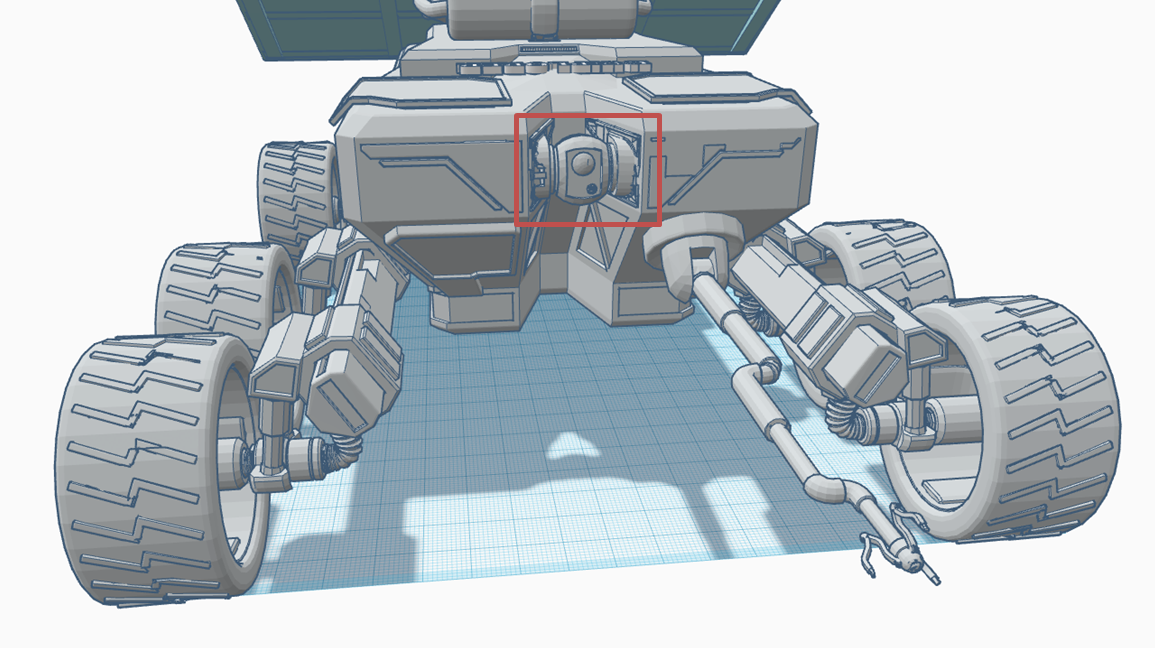
Las cámaras
Los "ojos" y otros "sentidos" del rover
El roverance tiene varias cámaras enfocadas a tareas de ingeniería y ciencia. Algunas nos ayudan a aterrizar en Marte, mientras que otras nos sirven de "ojos" en la superficie para conducir. Otras las utilizamos para realizar observaciones científicas y ayudar a la recogida de muestras.
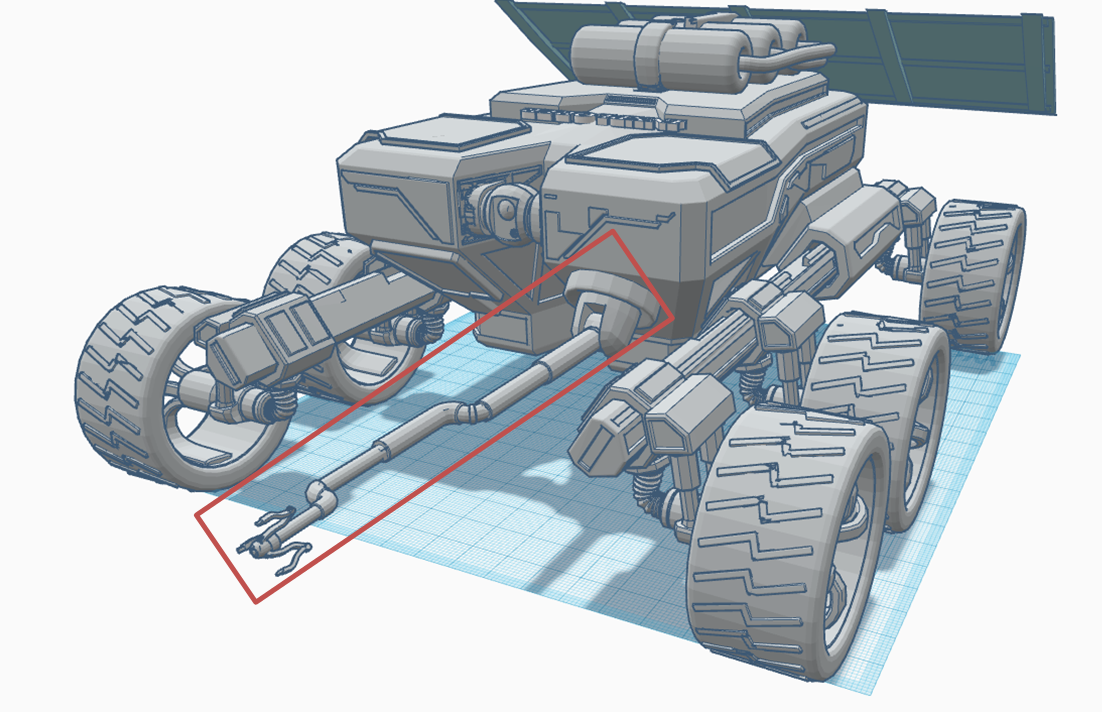
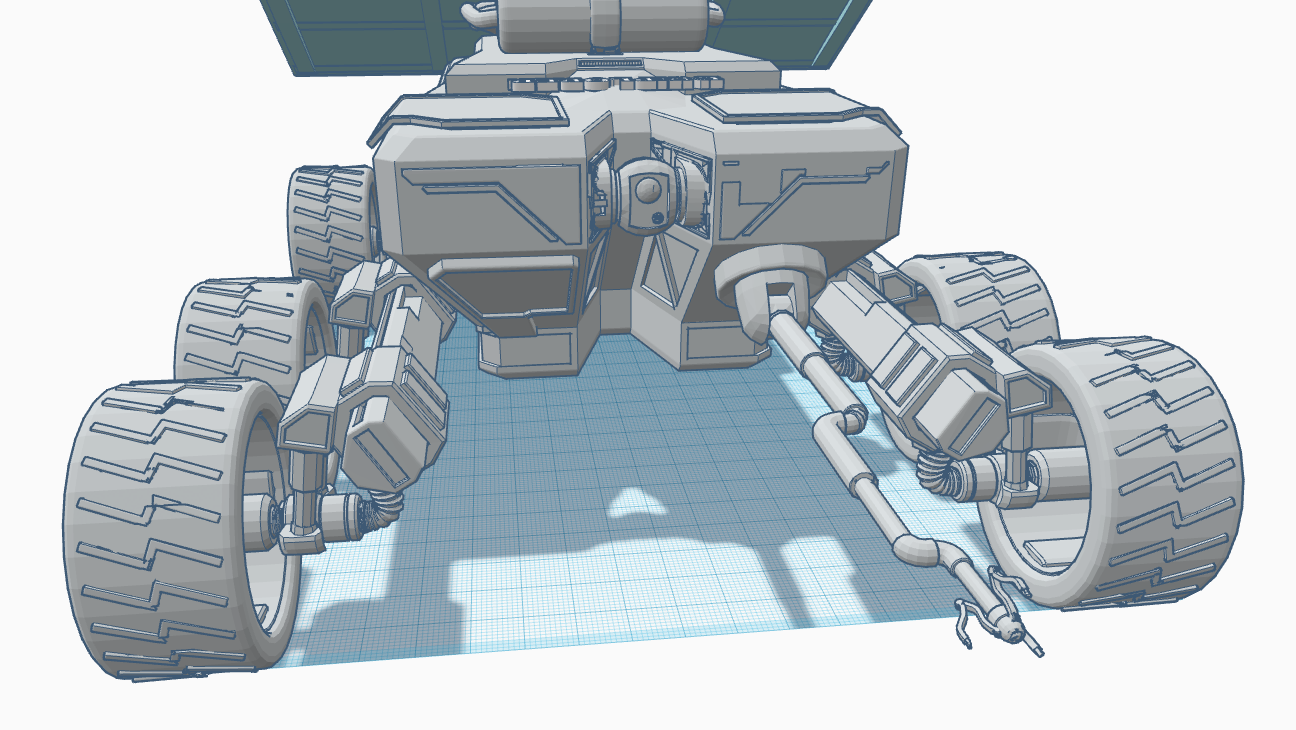
Brazo robótico
El brazo robótico de 3 pies de largo de Inxplorer puede moverse mucho como el tuyo. Y además se puede aumentar la longitud hasta 1,80 metros. Dispone de "articulaciones" en el hombro, el codo y la muñeca para lograr la máxima flexibilidad. El brazo permite al rover trabajar como lo haría un geólogo humano: sujetando y utilizando herramientas científicas con su "mano" o torreta. Las propias "herramientas de mano" del rover extraen núcleos de las rocas, toman imágenes microscópicas y analizan la composición elemental y mineral de las rocas y el suelo lunares.
Especificaciones técnicas
Longitud: 6 pies (1,8 metros)
Nombres de las herramientas en la torreta: SHERLOC y WATSON, PIXL, GDRT (herramienta de eliminación de polvo gaseoso), sensor de contacto con el suelo, taladro
Taladro: Se trata de un taladro de percusión rotatorio diseñado para extraer muestras de núcleos de roca de la superficie de Marte.
Brocas: Un conjunto de brocas intercambiables: broca de extracción de núcleos, broca de regolito y un abrasivo.
Función principal: Ayudar en la investigación de la superficie de Marte y en la recogida de muestras
Diámetro de los agujeros perforados:1 pulgada (27 mm)
Taladro
El taladro del rover utilizará un movimiento rotatorio con o sin percusión para penetrar en la superficie marciana y recoger las preciadas muestras. El taladro está equipado con tres tipos diferentes de accesorios (brocas) que facilitan la obtención de muestras y el análisis de la superficie. Las brocas de extracción de núcleos y de regolito se utilizan para recoger muestras marcianas directamente en un tubo de recogida de muestras limpio, mientras que la broca de abrasión se utiliza para raspar o "desgastar" las capas superiores de las rocas, con el fin de exponer las superficies frescas y no erosionadas para su estudio.
Tipos de muestras de roca que recogerá la perforadora
Muestras de rocas
El taladro cilíndrico extrae muestras del interior de las rocas, rompiendo la muestra de roca en su base.
Equipo de muestreo en la "mano" (torreta)
En el extremo del brazo está la "torreta". Es como una mano que lleva cámaras científicas y analizadores minerales y químicos para estudiar la habitabilidad pasada de Marte y elegir la muestra de mayor valor científico para guardarla.
Sensor de contacto con el suelo
La torreta tiene un sensor especial para evitar daños si el brazo entra en contacto con la superficie. El sensor de contacto indica al brazo del rover que se detenga si toca inadvertidamente el suelo.
Manipulación de muestras
El Inxplorer tomará muestras de rocas y suelo lunares. Con su taladro, el rover recogerá y almacenará los núcleos en tubos en la superficie lunar.
Controles de temperatura
Para sobrevivir durante todas las fases de la misión, los "órganos vitales" del rover no deben superar temperaturas extremas de -173°(-280° Fahrenheit a) Celsius a +127° Celsius (260° Fahrenheit).
Los elementos esenciales del rover, como las baterías, la electrónica y el ordenador, que son básicamente el corazón y el cerebro del rover, permanecen a salvo dentro de una Caja Electrónica Caliente (WEB), comúnmente llamada "cuerpo del rover". El cuerpo del rover está provisto de calefactores y, al igual que un abrigo, las paredes del rover ayudan a mantener el calor cuando las temperaturas nocturnas en la Luna pueden descender hasta los -173° Celsius (-° Fahrenheit). Al igual que un atleta suda para liberar el calor después de un entrenamiento intenso, el cuerpo del rover también puede liberar el exceso de calor a través de sus radiadores, similares a los utilizados en los motores de los coches.
Inxplorer: Piezas Rover
El rover tiene un:
| un cuerpo: | una estructura que protege los "órganos vitales" de los rovers |
| cerebros: | ordenadores para procesar la información |
| controles de temperatura: | calentadores internos, una capa de aislamiento, y más |
| un "cuello y cabeza": | un mástil para que las cámaras den a los rovers una visión a escala humana |
| ojos y otros "sentidos": | cámaras e instrumentos que proporcionan a los rovers información sobre su entorno |
| brazo: | una forma de ampliar su alcance |
| ruedas y "patas": | piezas para la movilidad |
| energía: | baterías y paneles solares |
| comunicaciones: | antenas para "hablar" y "escuchar" |
Otros proyectos:
Alba Fernández Maireles
 Sevilla - España
MARIA PONS MASCARÓ
Sevilla - España
MARIA PONS MASCARÓ
 FERRERÍAS (MENORCA) - España
Simon-Dani
FERRERÍAS (MENORCA) - España
Simon-Dani
 Torre del Mar - España
Torre del Mar - España