Moon Camp Discovery 2021-2022 projekti galerii
Kõik | Kuu maandur | Kuu baas | Lunar Rover | Rakett | Kuu orbitaalne kosmosejaam | Kosmoseülikond
Meeskond: Inxplorer
Kategooria: Kategooria: Kuuvarjustaja | Kandy | Sri Lanka | 1 | 14 aastat vana
Välislink Tinkercad 3D disaini jaoks
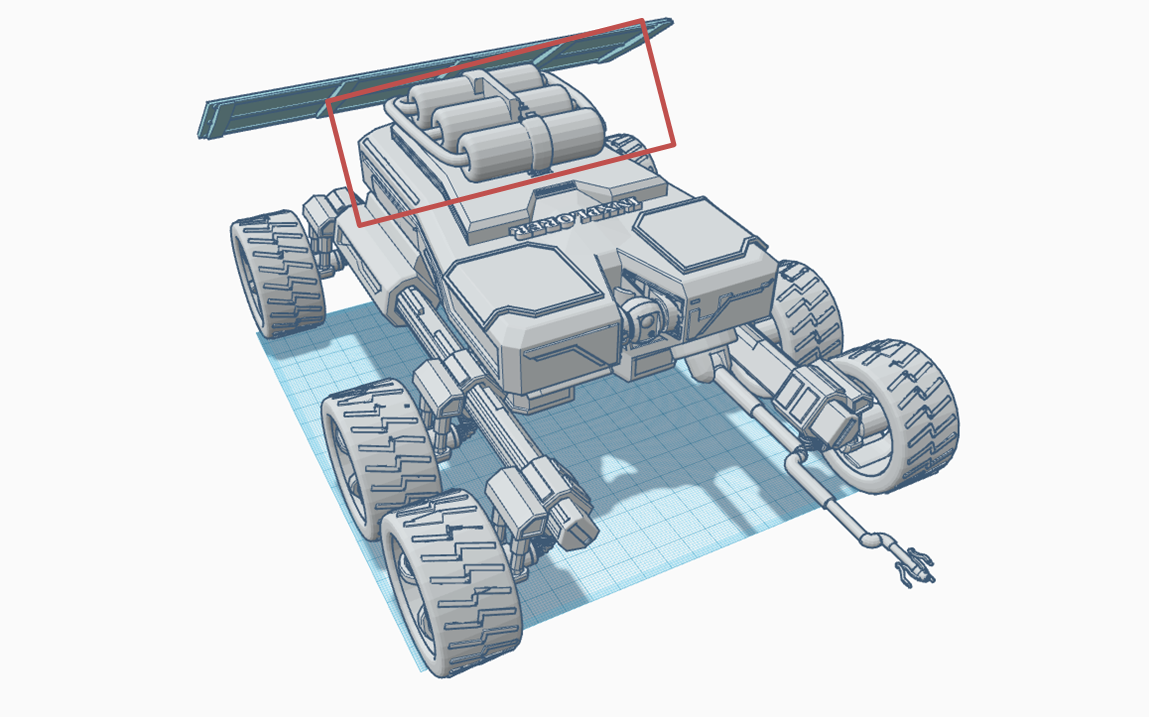


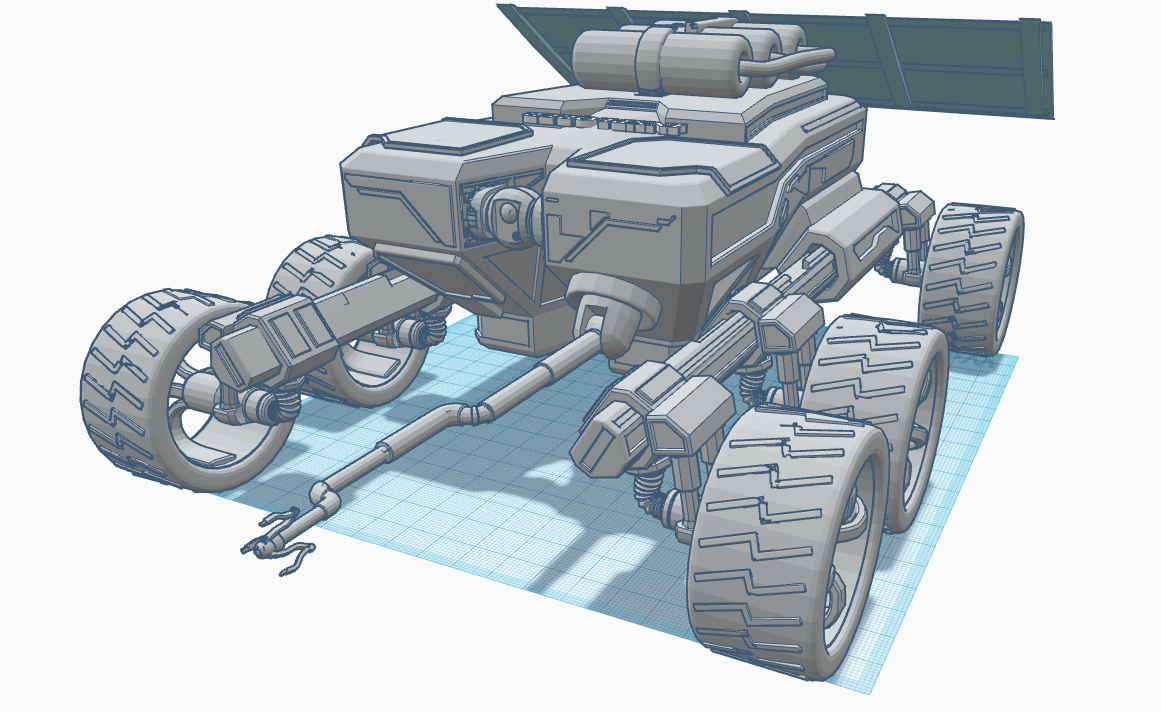
Inxplorer Rover
Viiest mitmeotstarbelisest U-kujulisest ränduri perekonnast, mis on mõeldud teadusinstrumentide ja kasuliku koormuse kandmiseks. Juno maasturid kasutati NASA juhitud välitöödel Hawaii vulkaani kivisel nõlval, et simuleerida missioone Kuule. See töötati välja selleks, et koguda Kuult proove, teha teaduslikke mõõtmisi ja demonstreerida selliseid ülesandeid nagu pikamaasõit ja öösel ellujäämine.
Tehnilised üksikasjad
| Sihtkoht | Moon |
| Suurus (pikkus, laius, kõrgus) | 1,38 m x 1,6 m x 0,75 m (ilma paigaldatud masti lisavarustuseta) |
| Mass | 250 kg |
| Võib kanda | 200 kg |
| Kiirus | 12,5 km/h tippkiirus |
| Powered by | Elektriline võimsus (liitium-ioonakud) |
Tähtsündmused
- Inxplorer suudab vedada peaaegu sama palju, kui ta kaalub, on üllatavalt kiire ja vilgas ning suudab sõita üle igasuguse maastiku ja suurte kivide. Samuti saab see puurida kaljusid, võtta proove ja analüüsida kaljusid oma kõrglahutusega mikroskoopiaseadme abil.
- Saab kas juhtida inimese lähedal või skaneerida oma keskkonda ja navigeerida iseseisvalt. Kui ta märkab sihtmärgi, võib täielikult autonoomne liikur ise kohale sõita, oma robotkäe abil kaevata kraavi, võtta proove ja panna need kogumiskanistritesse, mis asuvad kummalgi tema "õlgadel".
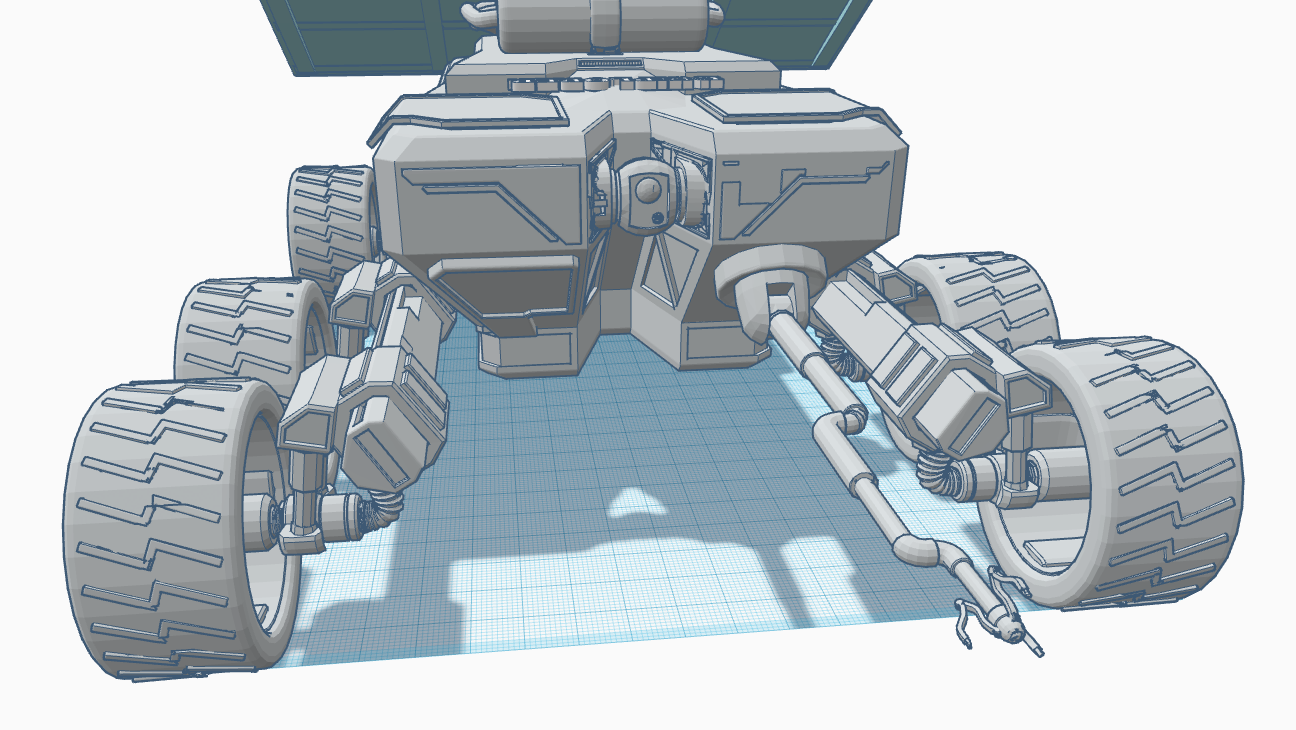
- Neljarattavedu unikaalse ratta süsteemiga, mis võimaldab seda 360 kraadi samal kohal keerata.
- Selle kaevamisrobotkäsi täidab topeltülesandeid sensorite masti funktsioonina, mis võimaldab tal skaneerida ja kaardistada oma keskkonda mineraalide, vee või jää otsimiseks.
- See Rover saab ka öösel hõlpsasti sõita öise režiimiga. Roveril on kaks peavalguse ja öökaamerat kvaliteetsete piltide saamiseks.
UURIMINE NÕUAB LIIKUVUST
Uurimine nõuab liikuvust. Olenemata sellest, kas olete Maal või nii kaugel nagu Kuu või Marss, vajate oma sõidukiga ühest kohast teise liikumiseks häid rehve.
Rattad Kuu peal
Kolm peamist ratta disainilahendused tutvustasid NASA ja teised rahvusvahelised teadlased varajase uurimise eesmärgil. Kuigi need olid väga erinevad, keskendusid nad kõik riistvara ja astronautide liikumisele Kuu pinnal.
Kevadine rehv
Samuti saab Inxplorer rover reguleerida oma telje pikkust ja läbida kive ja väikseid auke.
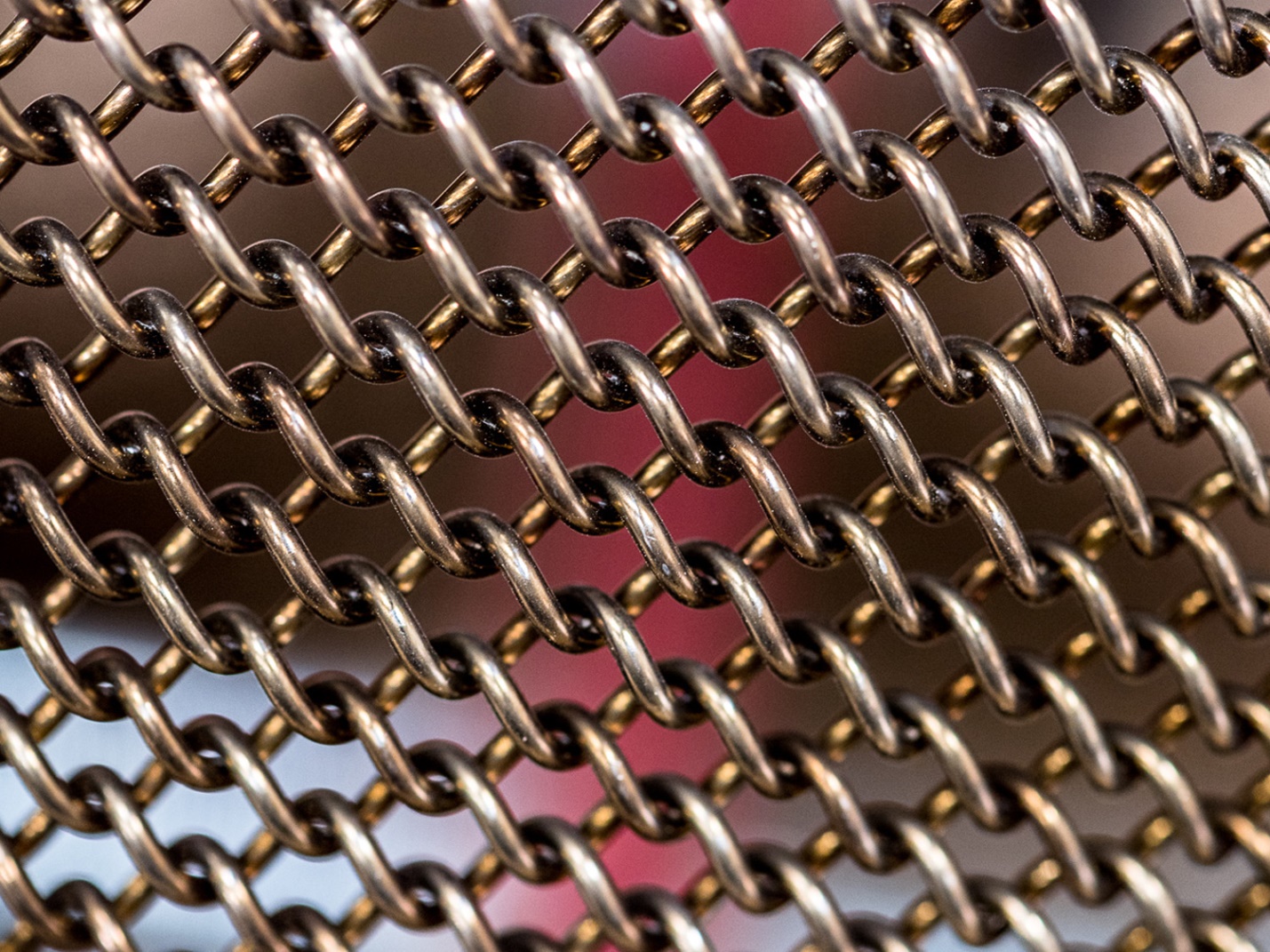
Rehvide arhitektuur
Kui varajase rehvi konstruktsioonis kasutati kootud traati, siis meie kasutame vedrurrehve, mis on valmistatud omavahel ühendatud spiraalide seeriast. Kaalub umbes 20 naela ja suudab taluda 165 naela koormust. Loodame kasutada neid rattaid Roveri jaoks.
ISRU instrument
Nagu Inxpolrer meeskond, Me ei unusta lisada ISRU osa meie Rover. See osa võib hõlmata metallide kaevandamist ehitusmaterjaliks kosmoses, mis võib olla kuluefektiivsem kui sellise materjali toomine Maa või mõne muu suure keha, näiteks Kuu või Marsi sügavast gravitatsioonikaevust.
Asukohad
Moon
Kuu omab rikkalikult tooraineid, mis on potentsiaalselt olulised tulevaste rakenduste hierarhias, alustades Kuu materjalide kasutamisest, et hõlbustada inimtegevust Kuu peal, ning jätkates Kuu ressursside kasutamisega, et toetada tulevast tööstuslikku võimekust Maa-Kuu süsteemis. Loodusvarade hulka kuuluvad päikeseenergia, hapnik, vesi, vesinik ja metallid. Kuu kõrgustiku materjali anortiiti saab kasutada alumiiniumimaagina. Sulatajad võivad toota anorthiidist puhast alumiiniumi, kaltsiummetalli, hapnikku ja räniklaasi. Tooranorthiit sobib ka klaaskiu ja muude klaas- ja keraamikatoodete valmistamiseks. Üks konkreetne töötlemistehnika on kasutada Maalt toodud fluori kaaliumfluoriidina, et eraldada tooraine Kuu kivimitest. Kuu regoliidist hapniku eraldamiseks on pakutud välja üle kahekümne erineva meetodi. Hapnikku leidub sageli rauarikastes kuuvarjundites ja -klaasides raudoksiidina. Hapnikku saab eraldada, kuumutades materjali temperatuuril üle 900 °C ja kokkupuutes seda vesinikugaasiga. Põhiline võrrand on järgmine: FeO + H2 → Fe + H2O. See protsess on hiljuti muutunud palju praktilisemaks, kuna kosmosesond Clementine avastas Kuu pooluste lähedal märkimisväärses koguses vesinikku sisaldavat regoliiti. Kuu materjale võib kasutada ka üldise ehitusmaterjalina. töötlemismeetodite abil, nagu näiteks paagutamine, kuumpressimine, vedeldamine ja valatud basalti meetod. Valatud basaltit kasutatakse maa peal näiteks torude ehitamiseks, kus on vaja suurt kulumiskindlust. Klaas ja klaaskiud on Kuu ja Marsi puhul lihtne töödelda. Basaltkiudu on valmistatud ka Kuu regoliidi simulaatoritest.
Maal on tehtud edukaid katseid kahe Kuu regoliidi simulandiga. MLS-1 ja MLS-2. Augustis 2005 sõlmis NASA lepingu 16 tonni Kuu pinnase simulatsiooni ehk Kuu regoliidi simulandi tootmiseks, et uurida, kuidas Kuu pinnast saaks kasutada. kohapeal.
Inxplorer Rover ISRU võimekuse klassifikatsioon
- ressursside kaevandamine
- materjali käitlemine ja transport
- pinna valmistamine koos kohapealressursid
- pinnakonstruktsioon
- ISRU toodete ja tarbekaupade pinnalähedane ladustamine ja jaotamine
- ISRU ainulaadne arendus- ja sertifitseerimisvõime
Muud osad
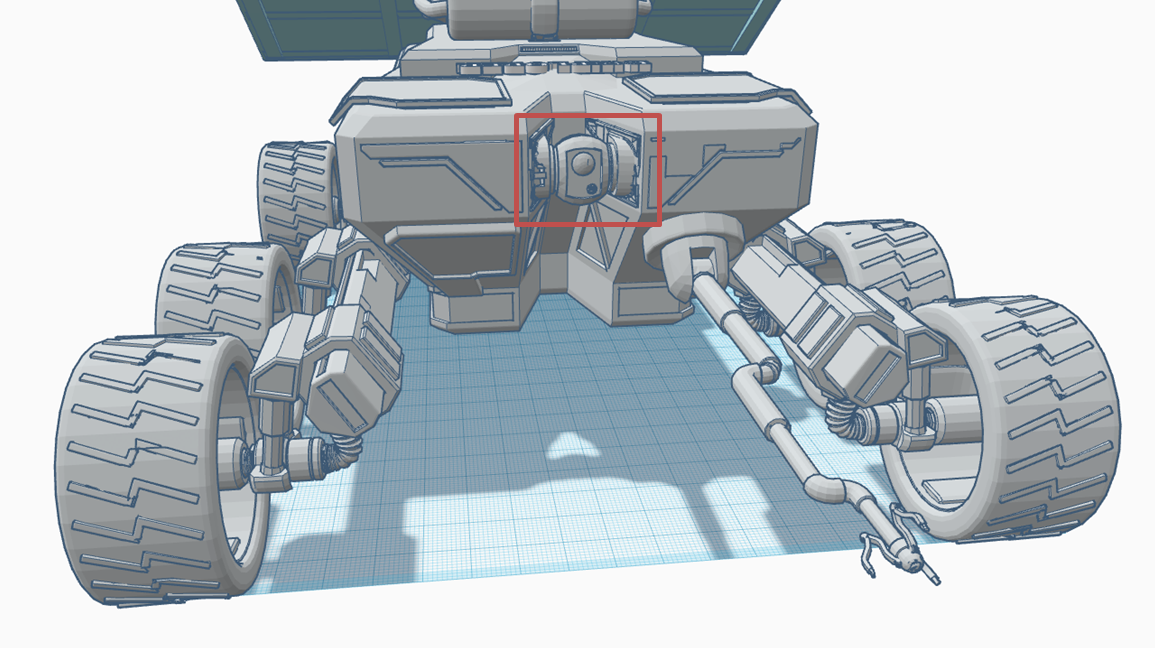
Kaamerad
Roveri "silmad" ja muud "meeled"
Perseverance'i liikuril on mitu kaamerat, mis on keskendunud tehnilistele ja teaduslikele ülesannetele. Mõned neist aitavad meil Marsile maanduda, teised aga on meie "silmad", millega mööda Marsi pinnast ringi sõita. Teisi kasutame teaduslikeks vaatlusteks ja proovide kogumiseks.
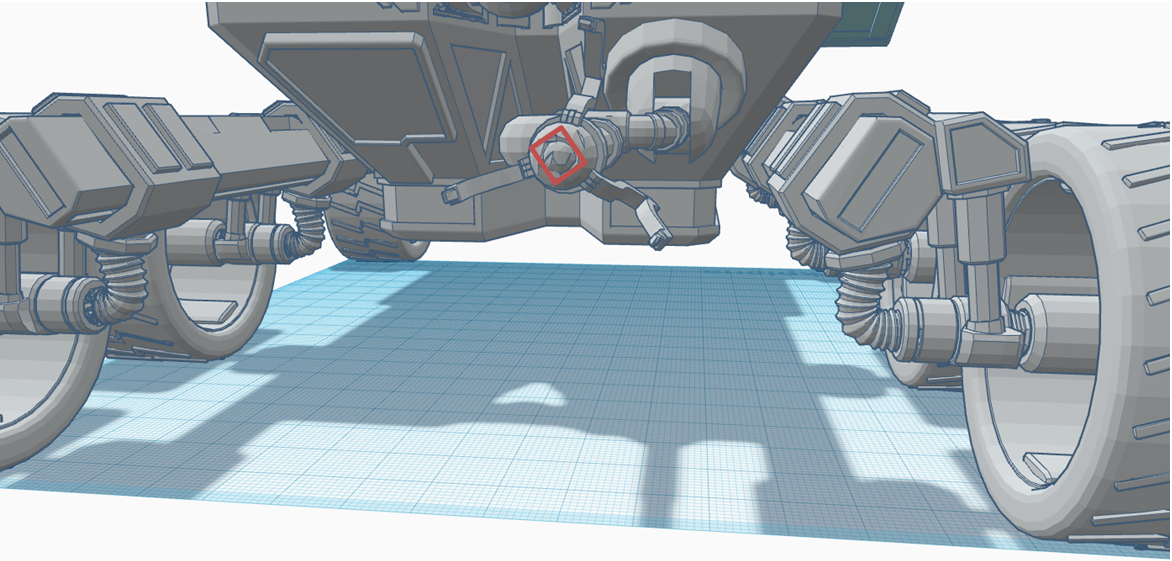
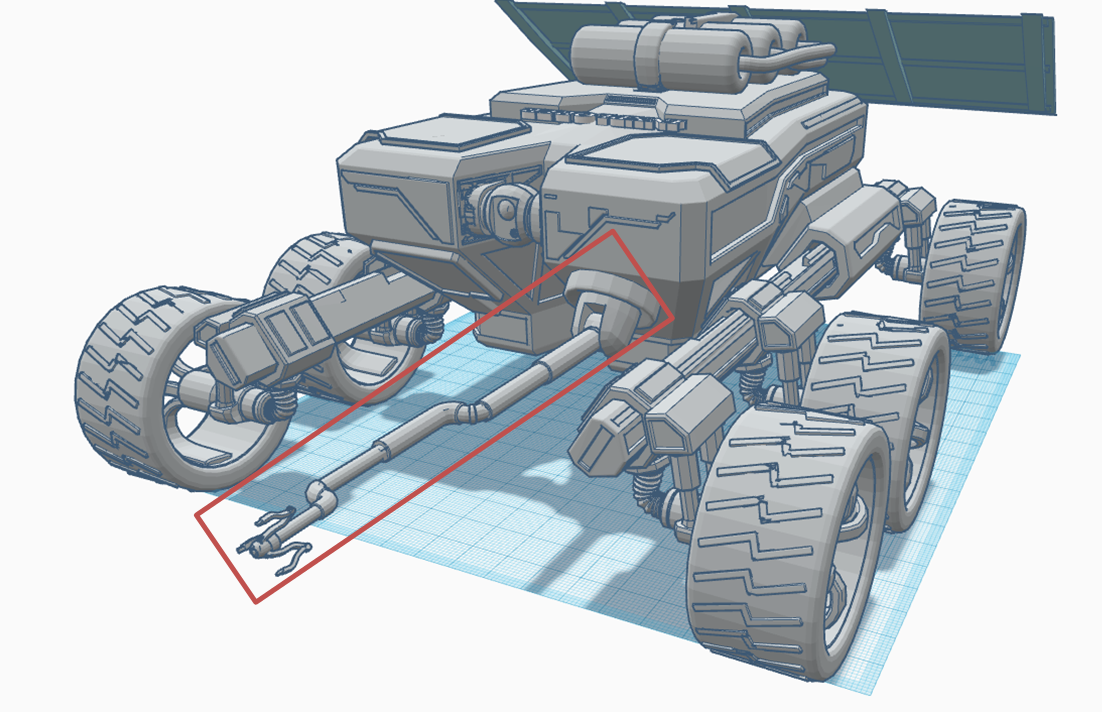
Robotkäsi
Inxploreri 3-jalgne robotkäsi võib liikuda paljuski nagu sinu oma. Ja ka me saame suurendada pikkust kuni 6-foot. Sellel on õla-, küünarnuki ja randme "liigendid" maksimaalse paindlikkuse tagamiseks. Käsi võimaldab liikuril töötada nii, nagu seda teeks inimese geoloog: hoides ja kasutades oma "käega" ehk torniga teaduslikke tööriistu. Mööduja enda "käsitööriistad" eraldavad kivimitest südamikke, teevad mikroskoopilisi pilte ning analüüsivad Kuu kivimite ja pinnase elementkoostist ja mineraalide koostist.
Tehnilised andmed
Pikkus: 1,8 meetrit (6 jalga)
Tööriistade nimed tornil: SHERLOC ja WATSON, PIXL, GDRT (gaasilise tolmu eemaldamise tööriist), maapealse kontakti andur, puurimine
Puur: Puur on pöörlev löökpuur, mis on mõeldud Marsi pinnalt kivimiproovide võtmiseks.
Puuripuurid: Vahetatavate otsikute komplekt: puurimisotsikud, regoliitotsikud ja abraktor.
Peamine funktsioon: Abistada Marsi pinnal toimuvatel uuringutel ja proovide kogumisel
Puuritud aukude läbimõõt:1 tolli (27 mm)
Puur
Marsikulguri puur kasutab Marsi pinnale tungimiseks pöörlevat liikumist koos löökidega või ilma, et koguda väärtuslikke proove. Puur on varustatud kolme eri tüüpi lisaseadmetega (bits), mis hõlbustavad proovide võtmist ja pinnaanalüüsi. Puurimis- ja regoliitpuuri kasutatakse Marsi proovide kogumiseks otse puhtasse proovide kogumise torusse, samas kui abrasiivpuuri kasutatakse kivimite ülemiste kihtide maha kraapimiseks või "maha hõõrumiseks", et paljastada uurimiseks värskeid, mittekuivatud pindu.
Puuriga kogutavate kivimiproovide tüübid
Kaljuproovid
Silindriline puur lõikab proove kivimi sisemusest välja, murdes kivimiproovi selle põhjas ära.
Proovivõtuseadmed "käes" (torn)
Käe lõpus on "torn". See on nagu käsi, mis kannab teaduslikke kaameraid, mineraalide ja keemiliste ainete analüsaatoreid, et uurida Marsi varasemat elamiskõlblikkust ja valida välja teaduslikult kõige väärtuslikum proov, mida kopeerida.
Maakontaktandur
Tornil on spetsiaalne andur, mis kaitseb käe kokkupuutel pinnaga tekkivate vigastuste eest. Kontaktandur annab märku, et liikurivars peatub, kui see kogemata maapinnaga kokku puutub.
Proovi käsitlemine
Inxplorer võtab proovid Kuu kivimitest ja pinnasest. Oma puuriga kogub ja säilitab maaversioonimasinad Kuu pinnal asuvates torudes.
Temperatuurikontrollid
Selleks, et säiliksid kõik missiooni eri faasid, ei tohi ränduri "elutähtsad organid" ületada äärmuslikke temperatuure -173° (-280° Fahrenheiti) Celsiuse ja +127° Celsiuse (260° Fahrenheiti) vahel.
Roveri olulised osad, nagu akud, elektroonika ja arvuti, mis on põhimõtteliselt Roveri süda ja aju, on turvaliselt soojas elektroonikakarbis (WEB), mida tavaliselt nimetatakse "Roveri kereks". Roveri korpuse sisse on pakitud soojendajad, mis aitavad nagu soe mantel hoida soojust, kui öine temperatuur Kuu peal võib langeda kuni -173 °C (-° Fahrenheiti). Nii nagu sportlane higistab, et pärast intensiivset treeningut soojust välja lasta, saab ka Roveri keha liigset soojust välja lasta oma radiaatorite kaudu, mis sarnanevad automootorites kasutatavatele radiaatoritele.
Inxplorer: Rover Parts
Roveril on:
| keha: | struktuur, mis kaitseb roversi "elutähtsaid organeid". |
| ajud: | arvutid teabe töötlemiseks |
| temperatuuri kontroll: | siseküttekehad, isolatsioonikiht ja muudki |
| "kaela ja pea": | masti kaamerate jaoks, et anda ränduritele vaade inimese mõõtkavas. |
| silmad ja muud "meeled": | kaamerad ja mõõteriistad, mis annavad roversidele teavet nende keskkonna kohta. |
| käsi: | võimalus laiendada selle ulatust |
| rattad ja "jalad": | liikuvust tagavad osad |
| energia: | akud ja päikesepaneelid |
| side: | antennid "kõnelemiseks" ja "kuulamiseks". |
Muud projektid:
Candela y Jorge
 Toledo - Hispaania
Intelligentsus on ilu
Toledo - Hispaania
Intelligentsus on ilu
 Doha - Katar
Palissy
Doha - Katar
Palissy
 Pariis - Prantsusmaa
Pariis - Prantsusmaa