Moon Camp Discovery 2021-2022 Galerie projektů
Všechny | Měsíční modul | Základna na Měsíci | Lunární vozítko | Raketa | Vesmírná stanice na oběžné dráze Měsíce | Vesmírný oblek
Tým: Inxplorer
Kategorie: Lunární rover | Kandy | Srí Lanka | 1 | 14 let
Externí odkaz pro 3D návrh Tinkercad
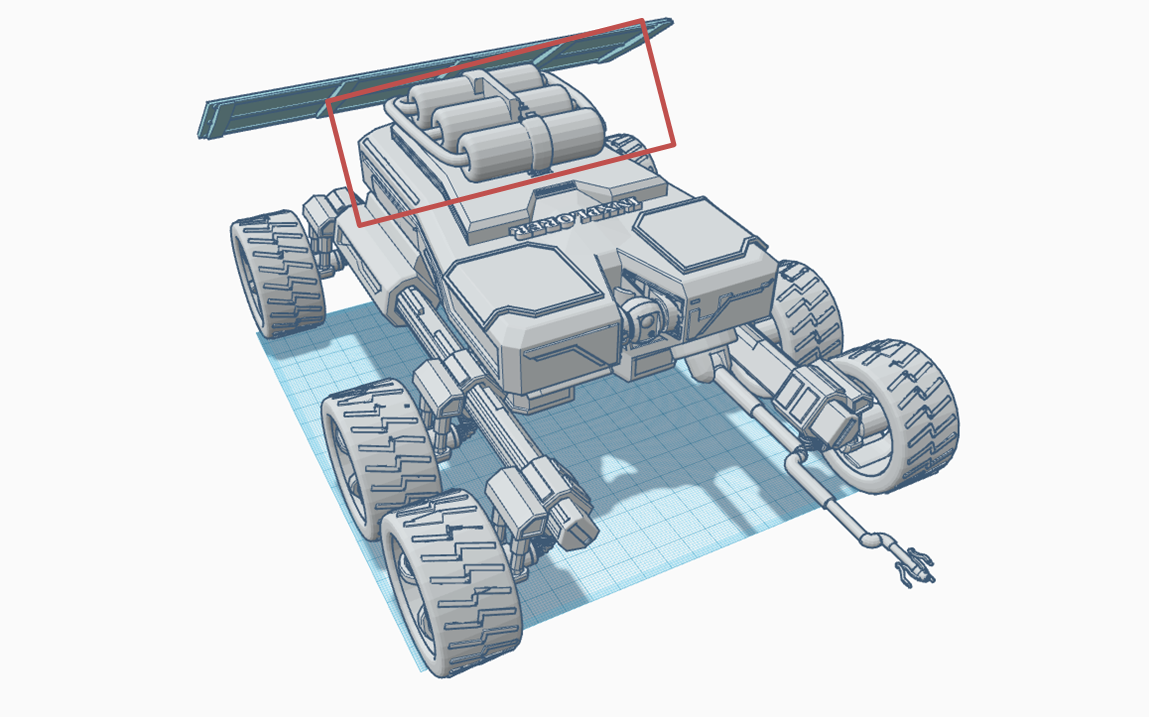


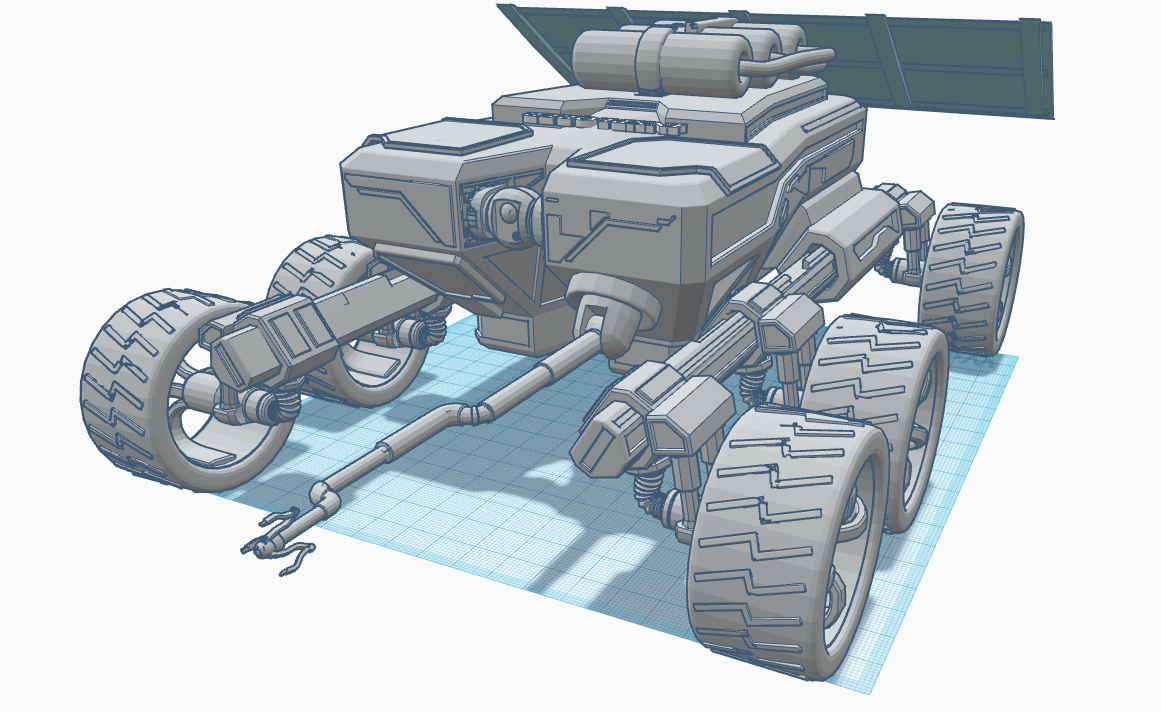
Inxplorer Rover
Rodina pěti víceúčelových roverů ve tvaru písmene U určených k přepravě vědeckých přístrojů a užitečného nákladu. Vozítka Juno byla použita při terénních testech pod vedením NASA na skalnatých svazích havajské sopky, aby simulovala mise na Měsíc. Byla vyvinuta za účelem sběru vzorků z Měsíce, získávání vědeckých měření a demonstrace úkolů, jako je cestování na dlouhé vzdálenosti a přežití v noci.
Technické detaily
| Cílová destinace | Měsíc |
| Velikost (délka, šířka, výška) | 1,38 m x 1,6 m x 0,75 m (bez instalovaného stožáru) |
| Hromadné | 250 kg |
| Může nést | 200 kg |
| Rychlost | Maximální rychlost 12,5 km/h |
| Powered by | Elektrické napájení (lithium-iontové baterie) |
Nejdůležitější informace
- Inxplorer uveze téměř tolik, kolik váží, je překvapivě rychlý a obratný a dokáže projet nejrůznějším terénem i velkými kameny. A dokáže vrtat do hornin, odebírat vzorky a provádět analýzy hornin pomocí svého mikroskopického přístroje s vysokým rozlišením.
- Může být ovládán člověkem v jeho blízkosti nebo může sám skenovat své okolí a navigovat se. Jakmile si všimne cíle, může plně autonomní vozítko samo dojet na místo, pomocí robotického ramene vyhloubit příkop, nabrat vzorky a uložit je do sběrných nádob umístěných na jednom z jeho "ramen".
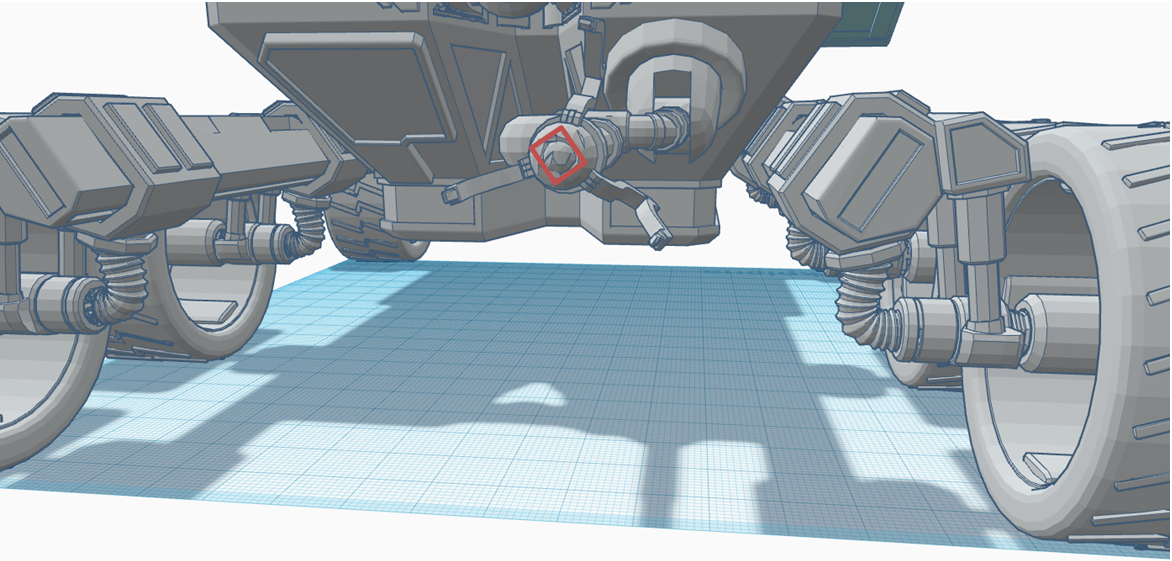
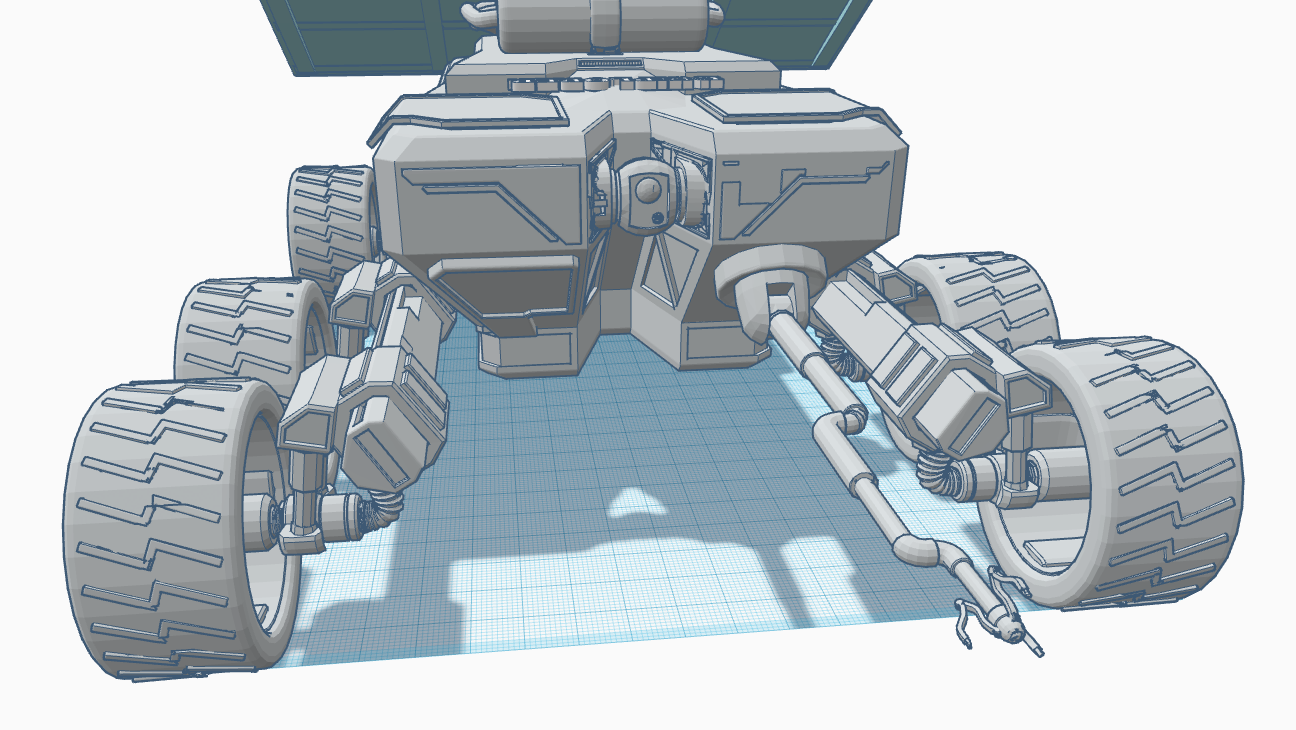
- Pohon všech čtyř kol s jedinečným systémem kol, který umožňuje otáčení o 360 stupňů na stejném místě.
- Jeho kopací robotické rameno slouží jako stožár pro senzory, které mu umožňují skenovat a mapovat prostředí a hledat minerály, vodu nebo led.
- Tento vůz Rover může díky nočnímu režimu snadno jezdit i v noci. Rover má dvě hlavní světelné a noční kamery pro vysoce kvalitní snímky.
PRŮZKUM VYŽADUJE MOBILITU
Průzkum vyžaduje mobilitu. A ať už se nacházíte na Zemi, nebo tak daleko jako na Měsíci či Marsu, potřebujete dobré pneumatiky, abyste se s vozidlem dostali z jednoho místa na druhé.
Kola na Měsíci
Tři hlavní konstrukce kol byly představeny NASA a dalšími mezinárodními výzkumníky pro včasný průzkum. I když se od sebe značně lišily, všechny se zaměřovaly na přesun hardwaru a astronautů po povrchu Měsíce.
Jarní pneumatika
Také vozítko Inxplorer může nastavit délku své nápravy a projíždět skály a malé jámy.
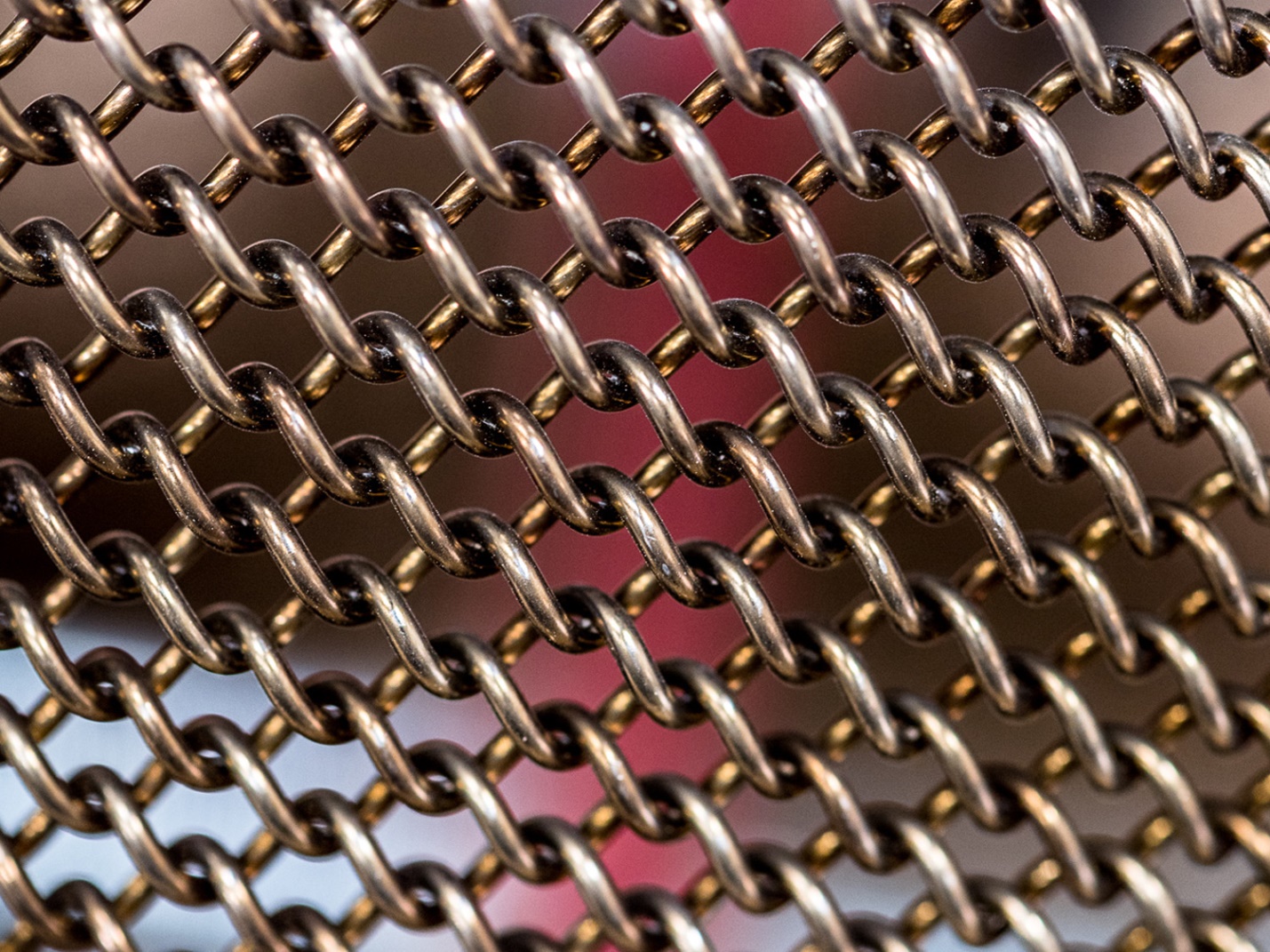
Architektura pneumatik
Zatímco dřívější konstrukce pneumatik používaly tkaný drát, my používáme pružinové pneumatiky, které jsou vyrobeny z řady vzájemně propojených závitů. Váží asi 20 kg a zvládnou zatížení 165 kg. Doufáme, že tato kola budeme používat pro Rover.
Nástroj ISRU
Jako tým Inxpolrer, Nezapomínáme přidat ISRU část pro náš Rover. Tato část může zahrnovat těžbu kovů pro stavební materiál ve vesmíru, což může být nákladově efektivnější než vynášení takového materiálu z hluboké gravitační studny Země nebo jiného velkého tělesa, jako je Měsíc nebo Mars.
Lokality
Měsíc
Měsíc disponuje velkým množstvím surovin, které jsou potenciálně důležité pro celou řadu budoucích aplikací, počínaje využitím měsíčních materiálů pro usnadnění lidských činností na Měsíci samotném a konče využitím měsíčních zdrojů pro podporu budoucích průmyslových kapacit v rámci systému Země-Měsíc. Přírodní zdroje zahrnují sluneční energii, kyslík, vodu, vodík a kovy. Měsíční horninový materiál anortit lze využít jako hliníkovou rudu. Tavírny mohou z anorthitu vyrábět čistý hliník, kovový vápník, kyslík a křemenné sklo. Surový anorthit je také vhodný pro výrobu skleněných vláken a dalších sklářských a keramických výrobků. Jednou ze zvláštních technik zpracování je použití fluoru přiváženého ze Země ve formě fluoridu draselného k oddělení surovin od měsíčních hornin. Bylo navrženo více než dvacet různých metod získávání kyslíku z měsíčního regolitu. Kyslík se často nachází v měsíčních minerálech a sklech bohatých na železo ve formě oxidu železitého. Kyslík lze extrahovat zahřátím materiálu na teplotu vyšší než 900 °C a jeho vystavením plynnému vodíku. Základní rovnice je následující: FeO + H2 → Fe + H2O. Tento proces se nedávno stal mnohem praktičtějším díky objevu značného množství regolitu obsahujícího vodík v blízkosti pólů Měsíce sondou Clementine. Měsíční materiály mohou být také použity jako obecný stavební materiál. prostřednictvím zpracovatelských technik, jako je např. spékání, lisování za tepla, zkapalňování a metoda litého čediče. Litý čedič se na Zemi používá například pro stavbu potrubí, kde je vyžadována vysoká odolnost proti otěru. Sklo a skleněná vlákna jsou na Měsíci a Marsu snadno zpracovatelné. Čedičová vlákna byla vyrobena také ze simulátorů měsíčního regolitu.
Na Zemi byly provedeny úspěšné testy s použitím dvou simulantů měsíčního regolitu. MLS-1 a MLS-2. V srpnu 2005 NASA uzavřela smlouvu na výrobu 16 tun simulované měsíční půdy neboli materiálu simulujícího měsíční regolit pro výzkum využití měsíční půdy. in situ.
Klasifikace schopností roveru Inxplorer ISRU
- těžba zdrojů
- manipulace s materiálem a přeprava
- povrchová výroba s in situzdroje
- konstrukce povrchu
- skladování a distribuce produktů a spotřebního materiálu ISRU na povrchu.
- Jedinečné možnosti vývoje a certifikace ISRU
Ostatní díly
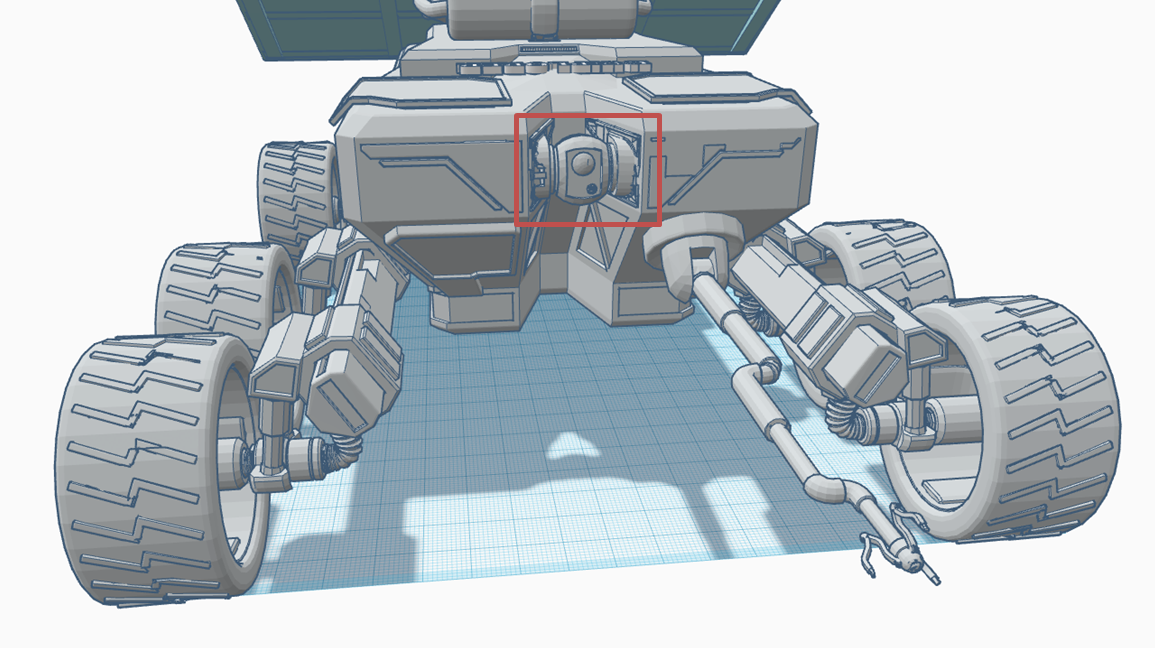
Kamery
"Oči" a další "smysly" vozítka
Vozítko Perseverance má několik kamer zaměřených na technické a vědecké úkoly. Některé nám pomáhají přistát na Marsu, jiné slouží jako naše "oči" na povrchu při jízdě. Jiné používáme k vědeckým pozorováním a pomáhají při sběru vzorků.
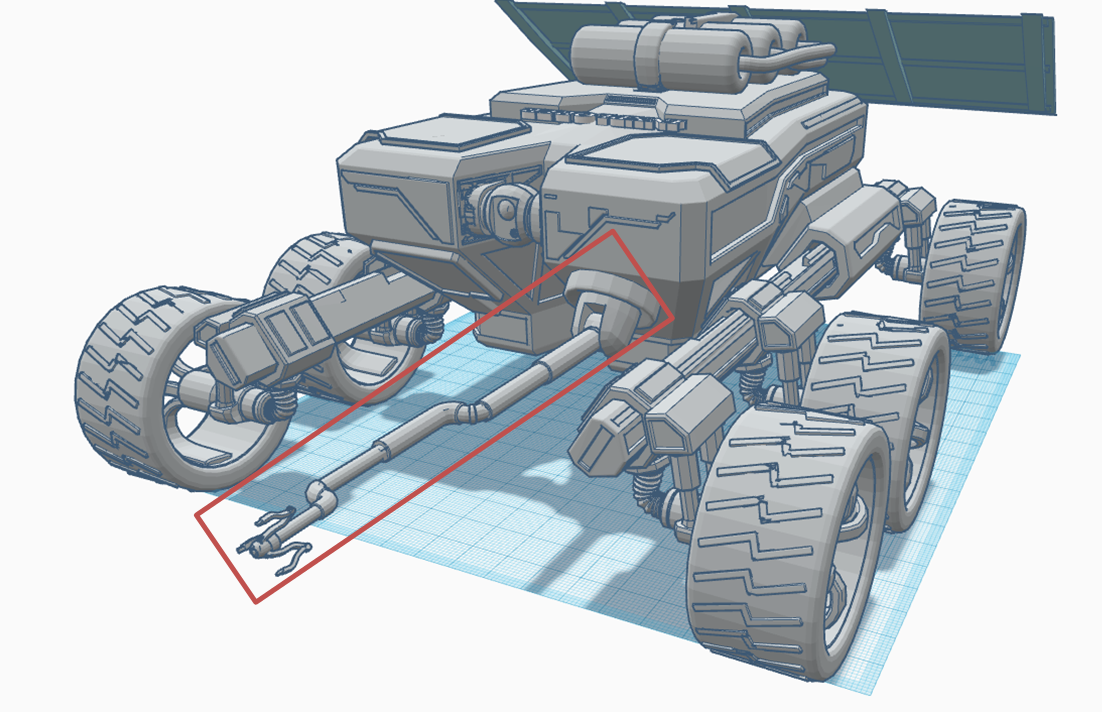
Robotické rameno
Třímetrová robotická ruka na Inxploreru se může pohybovat podobně jako ta vaše. A také můžeme zvětšit délku až na 6 stop. Má ramenní, loketní a zápěstní "klouby" pro maximální flexibilitu. Rameno umožňuje roveru pracovat stejně jako lidský geolog: držet a používat vědecké nástroje pomocí "ruky" nebo věže. Vlastní "ruční nástroje" roveru odebírají jádra z hornin, pořizují mikroskopické snímky a analyzují prvkové složení a minerální složení měsíčních hornin a půdy.
Technické specifikace
Délka: 6 stop (1,8 m)
Názvy nástrojů na věži: SHERLOC a WATSON, PIXL, GDRT (Gaseous Dust Removal Tool), Ground Contact Sensor, vrták
Cvičení: Vrták je rotační úderový vrták určený k odebírání vzorků hornin z povrchu Marsu.
Vrtáky: Sada vyměnitelných vrtáků: vrták na vývrty, vrták na regolit a bruska.
Hlavní funkce: Pomoc při průzkumu povrchu Marsu a sběru vzorků
Průměr vyvrtaných otvorů:1 palec (27 mm)
Vrták
Vrták roveru bude používat rotační pohyb s údery nebo bez nich, aby pronikl do povrchu Marsu a odebral cenné vzorky. Vrták je vybaven třemi různými druhy nástavců (vrtáků), které usnadňují získávání vzorků a analýzu povrchu. Vrtáky na koring a regolit slouží k odebírání marťanských vzorků přímo do čisté sběrné trubice, zatímco vrták na obrušování slouží k seškrabávání nebo "obrušování" svrchních vrstev hornin, aby se odhalil čerstvý, nezvětralý povrch ke studiu.
Typy vzorků hornin, které vrták odebírá
Vzorky hornin
Válcový vrták vyřezává vzorky z nitra hornin a odlamuje vzorek horniny u jeho základny.
Zařízení pro odběr vzorků na "ruce" (věži)
Na konci ramene je "věžička". Je to jako ruka, která nese vědecké kamery, minerální a chemické analyzátory pro studium minulé obyvatelnosti Marsu a výběr vědecky nejcennějšího vzorku do schránky.
Snímač zemního kontaktu
Věž je vybavena speciálním senzorem, který chrání rameno před poškozením, pokud se dostane do kontaktu s povrchem. Kontaktní senzor signalizuje zastavení ramene vozítka, pokud se nechtěně dotkne země.
Manipulace se vzorky
Inxplorer odebírá vzorky z měsíčních hornin a půdy. Pomocí vrtáku bude jádra odebírat a ukládat do trubek na povrchu Měsíce.
Řízení teploty
Aby rover přežil všechny fáze mise, nesmí jeho "životně důležité orgány" překročit extrémní teploty od -173°(-280° Fahrenheita do) Celsia do +127° Celsia (260° Fahrenheita).
Nejdůležitější součásti vozítka, jako jsou baterie, elektronika a počítač, které jsou v podstatě srdcem a mozkem vozítka, zůstávají v bezpečí uvnitř teplého elektronického boxu (WEB), kterému se běžně říká "tělo vozítka". Uvnitř tělesa roveru jsou umístěna topná tělesa a podobně jako teplý kabát pomáhají stěny roveru udržovat teplo, když noční teploty na Měsíci mohou klesnout až na -173 °C. Podobně jako se sportovec potí, aby uvolnil teplo po intenzivním tréninku, může tělo roveru uvolňovat přebytečné teplo prostřednictvím chladičů, podobných těm, které se používají v motorech automobilů.
Inxplorer: Rover Parts
Vozítko má:
| tělo: | konstrukce, která chrání "životně důležité orgány" roverů. |
| mozky: | počítače ke zpracování informací |
| ovládání teploty: | vnitřní topná tělesa, izolační vrstva a další. |
| "krk a hlava": | stožár pro kamery, který umožní roverům výhled v lidském měřítku. |
| oči a další "smysly": | kamery a přístroje, které vozítkům poskytují informace o jejich okolí. |
| rameno: | způsob, jak rozšířit její dosah |
| kola a "nohy": | díly pro mobilitu |
| energie: | baterie a solární panely |
| komunikace: | antény pro "mluvení" a "poslech". |
Další projekty:
Aillaud Dimitri
 Frouzins - Francie
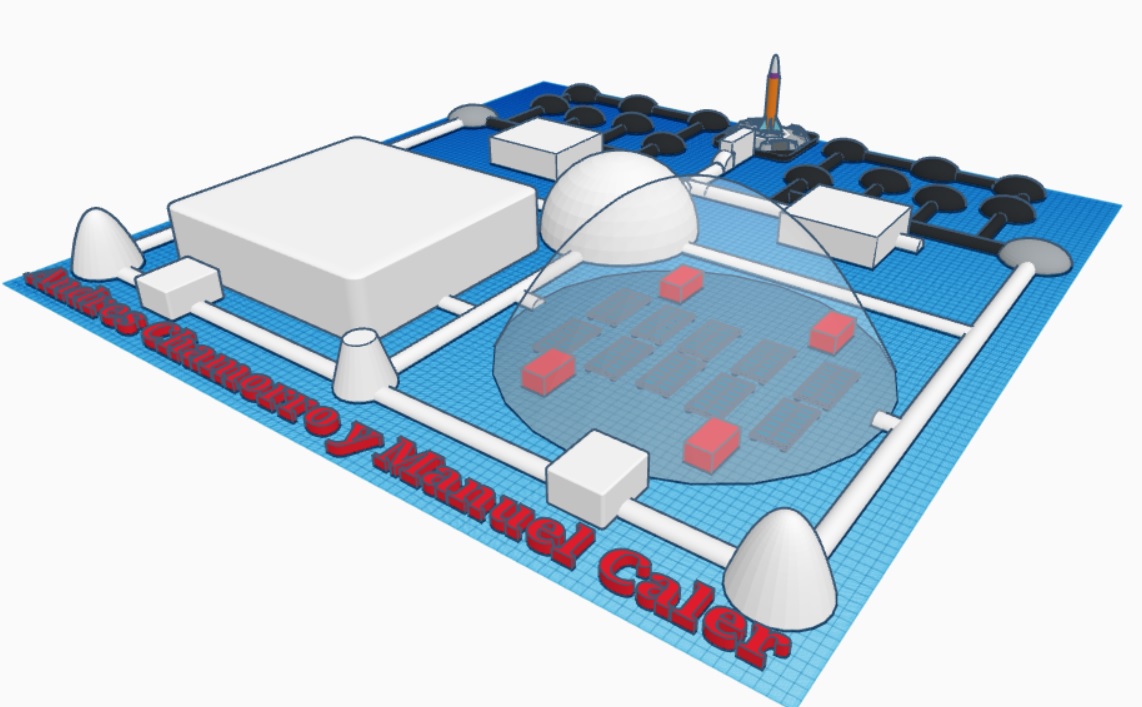
SOMBREADO MAC ANDRÉS Y MANUEL
Frouzins - Francie
SOMBREADO MAC ANDRÉS Y MANUEL

 ANDÚJAR - Španělsko
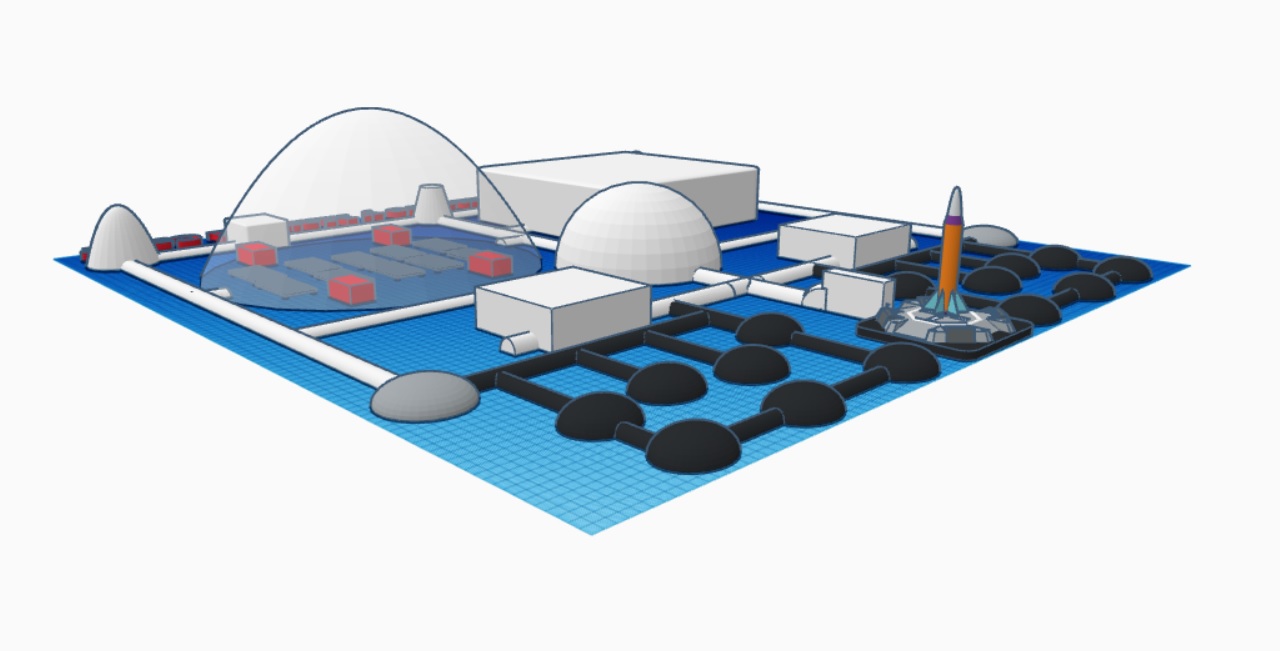
Raketová základna Tým
Toledo - Španělsko
ANDÚJAR - Španělsko
Raketová základna Tým
Toledo - Španělsko