Moon Camp Discovery 2021-2022 Galéria projektov
Všetky | Lunárny pristávací modul | Mesačná základňa | Mesačný rover | Raketa | Vesmírna stanica na obežnej dráhe Mesiaca | Vesmírny oblek
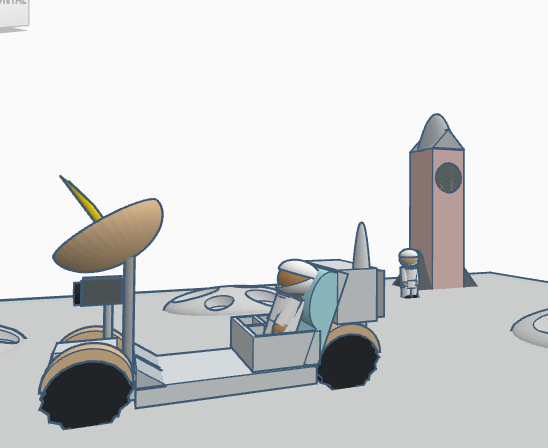
Tím: Sara Mohammed Abdulla
Kategória: Mesačný rover | Abú Zabí | Spojené arabské emiráty | 1 | 14 rokov
Externé prepojenie pre 3D návrh Tinkercad
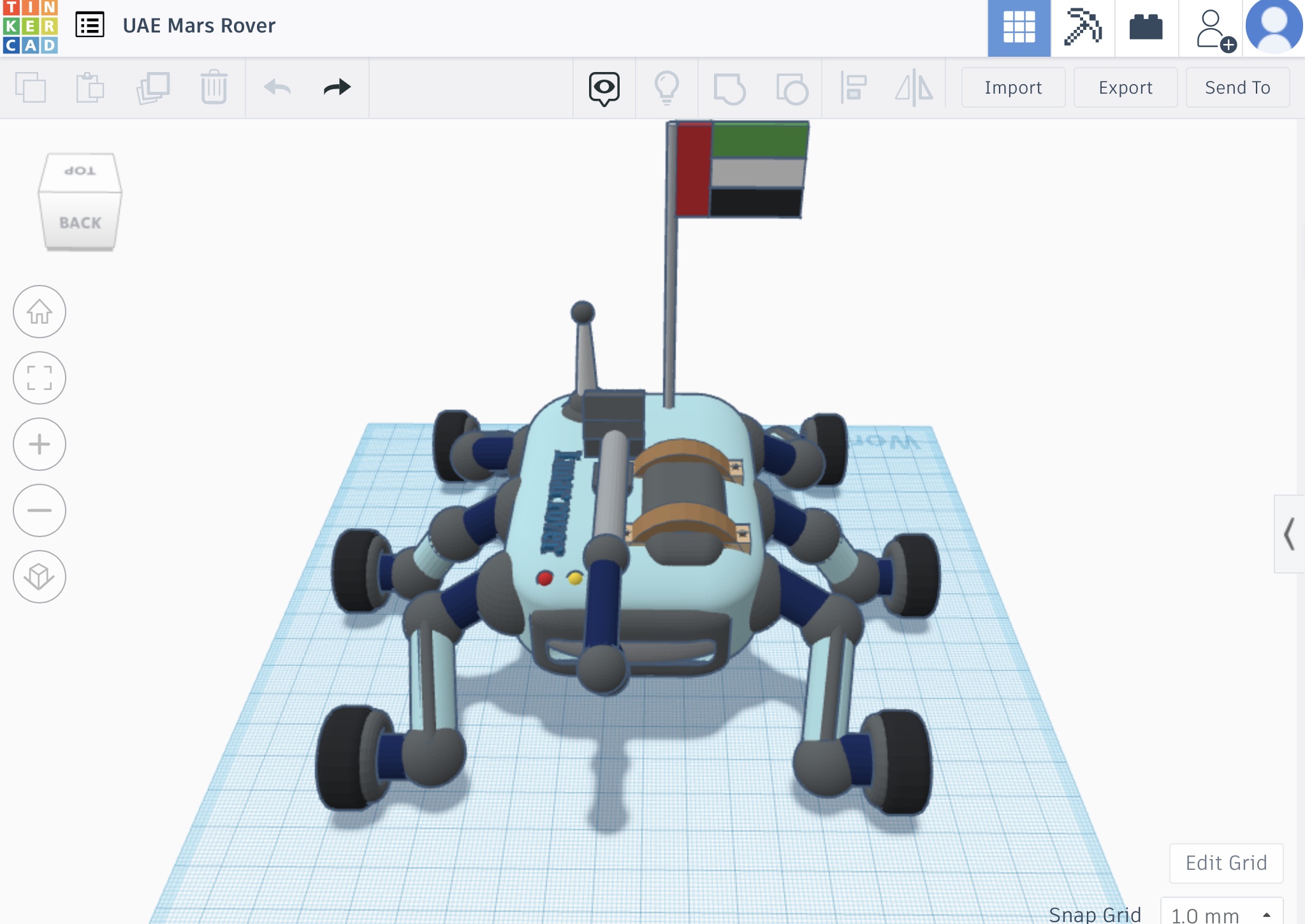
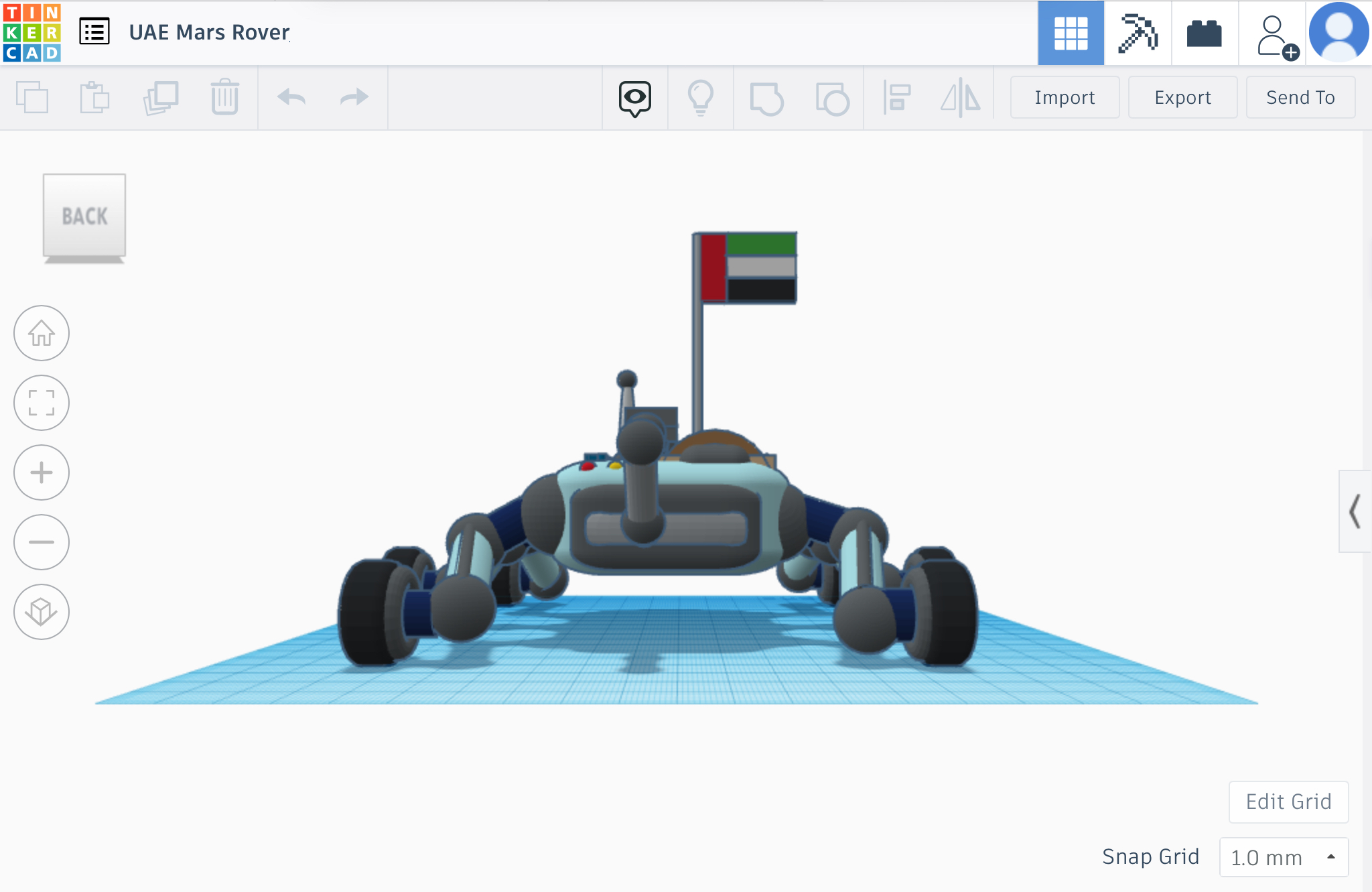
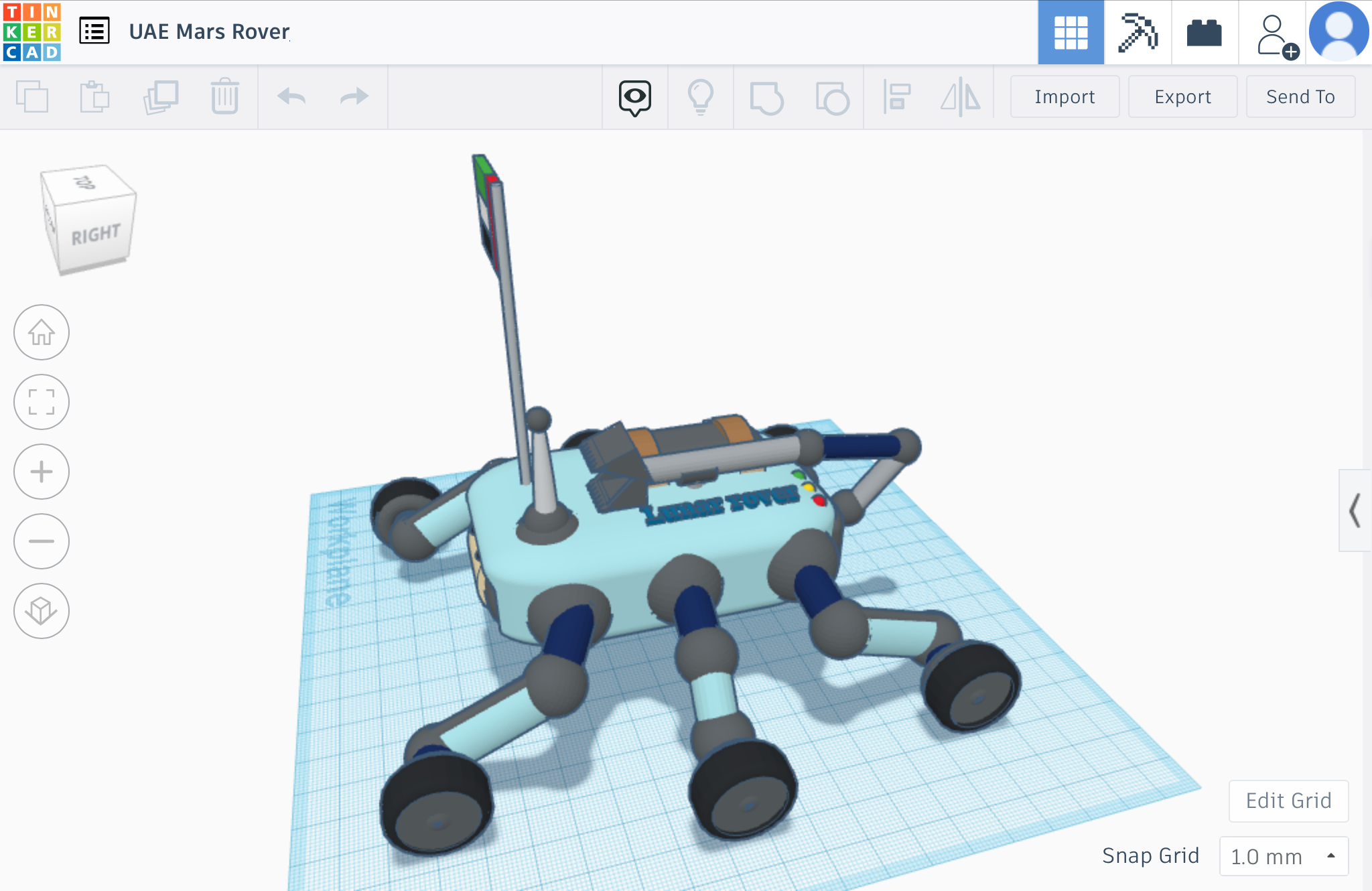
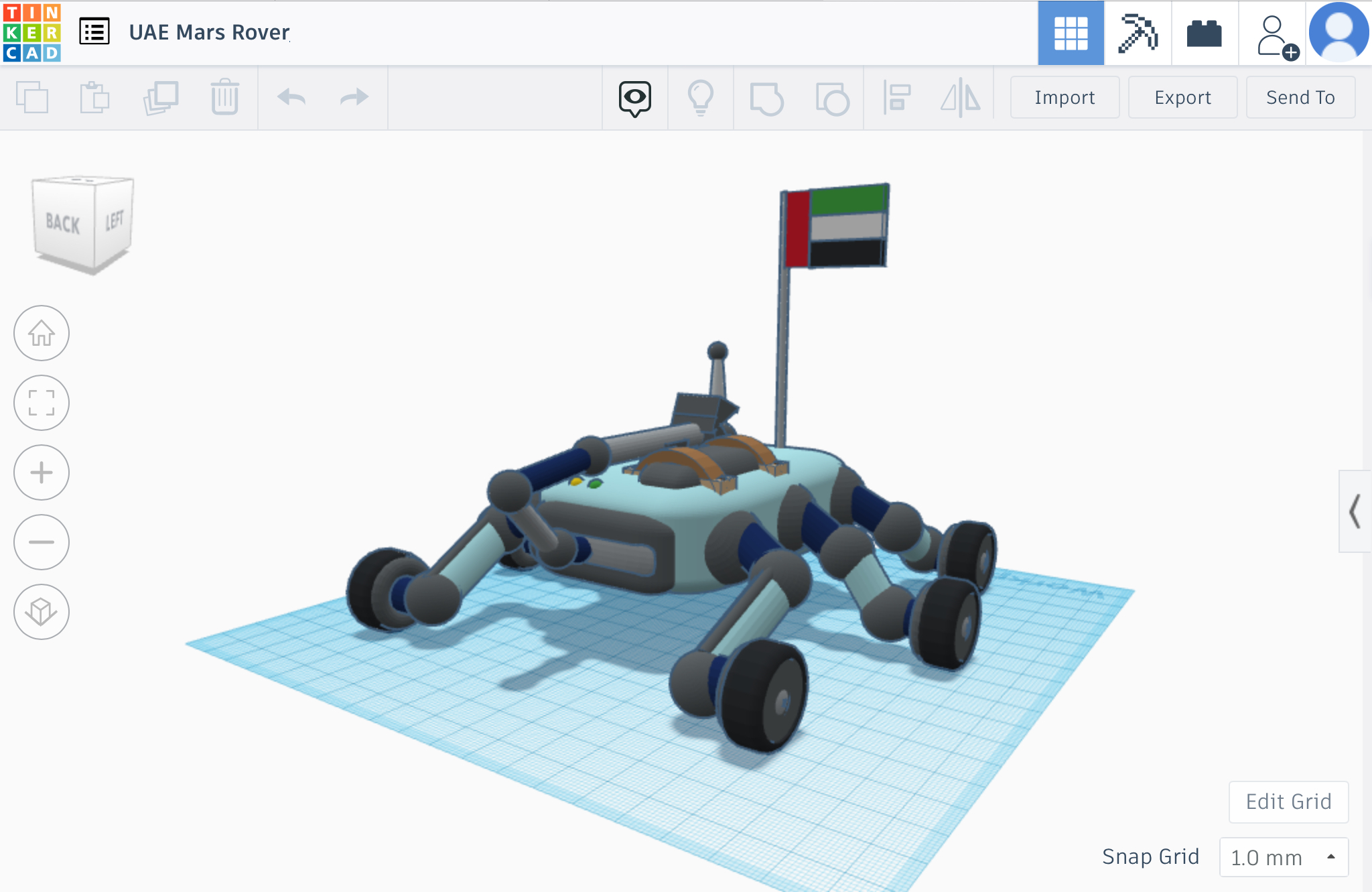
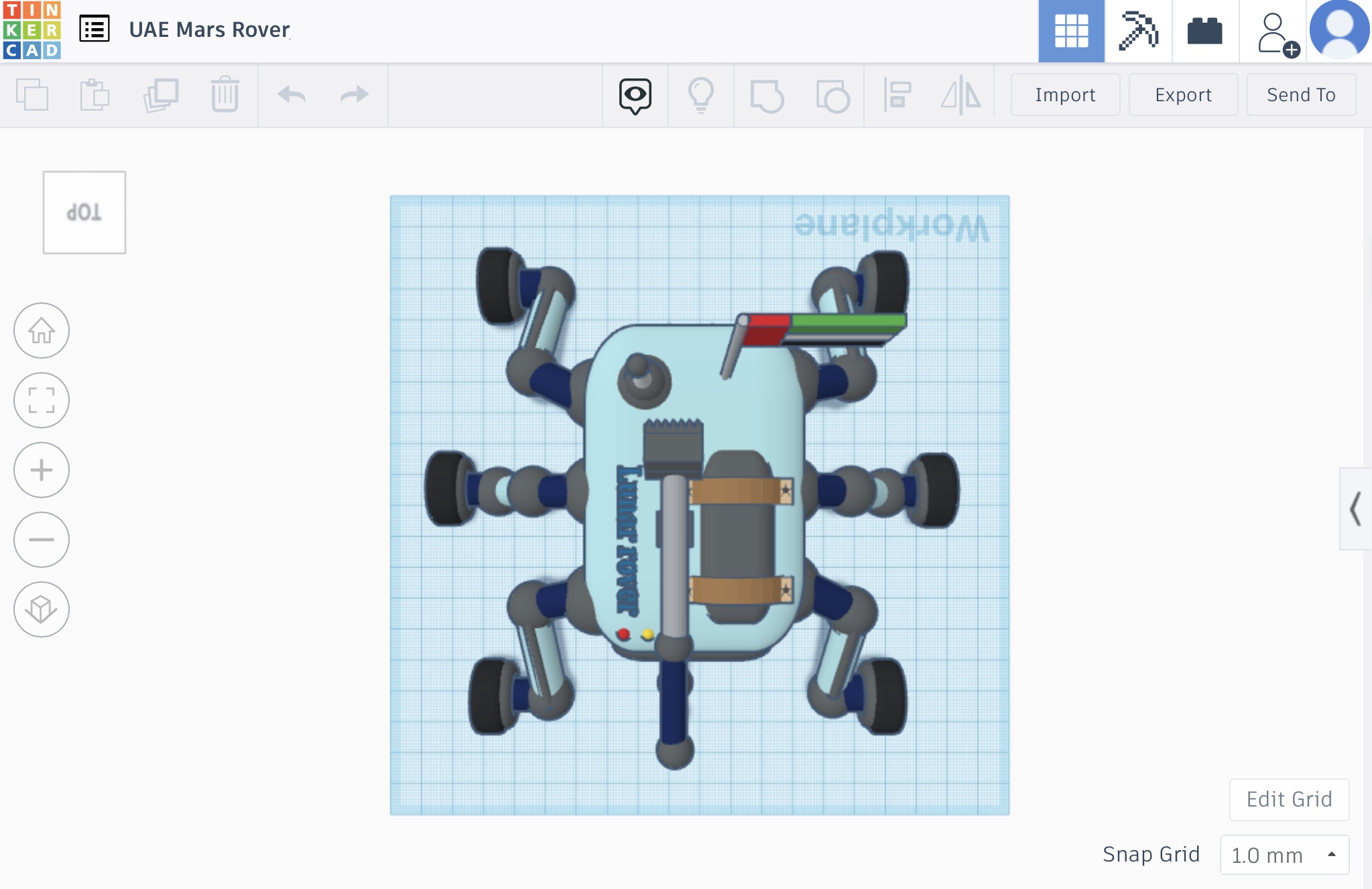
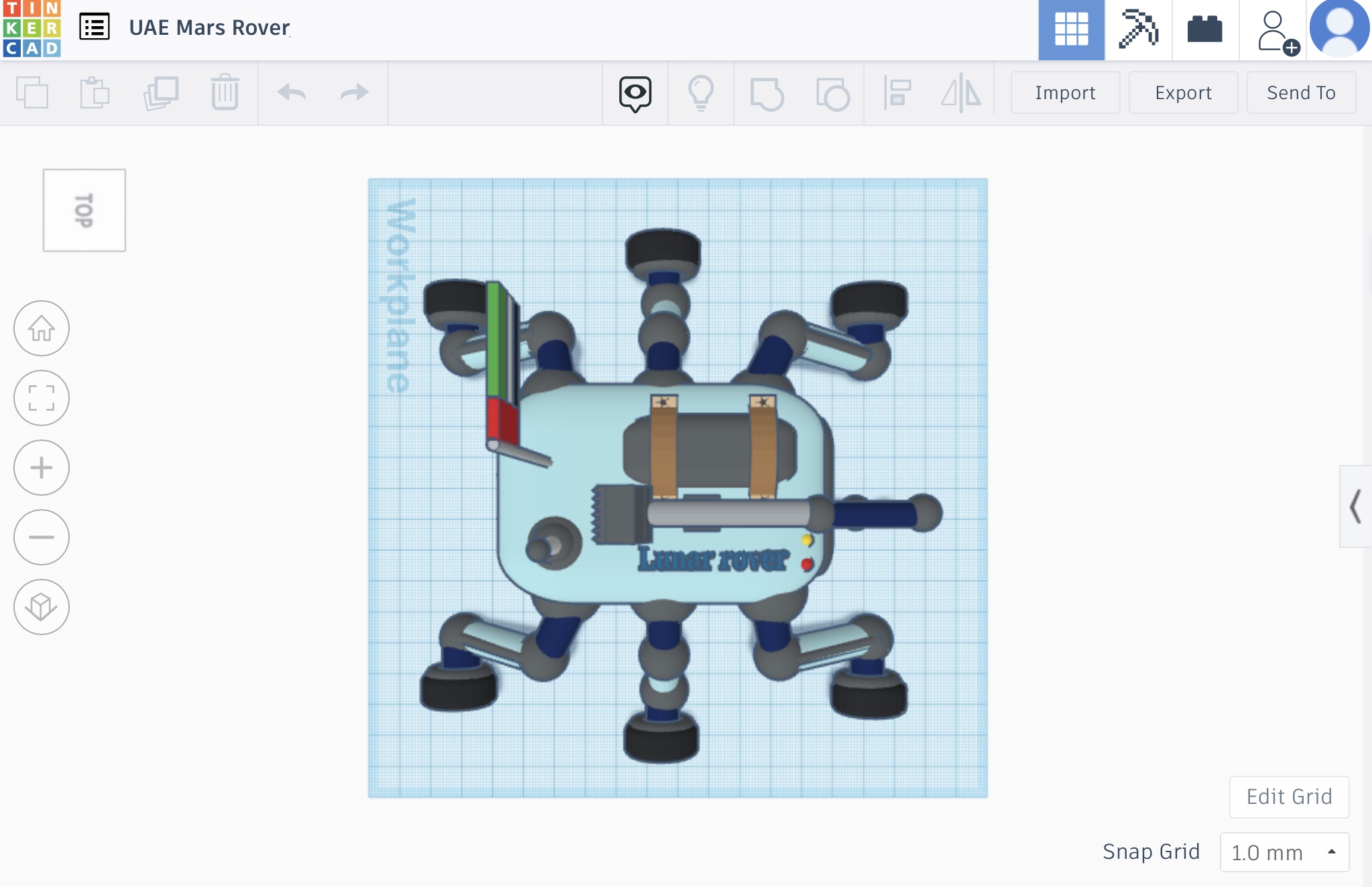
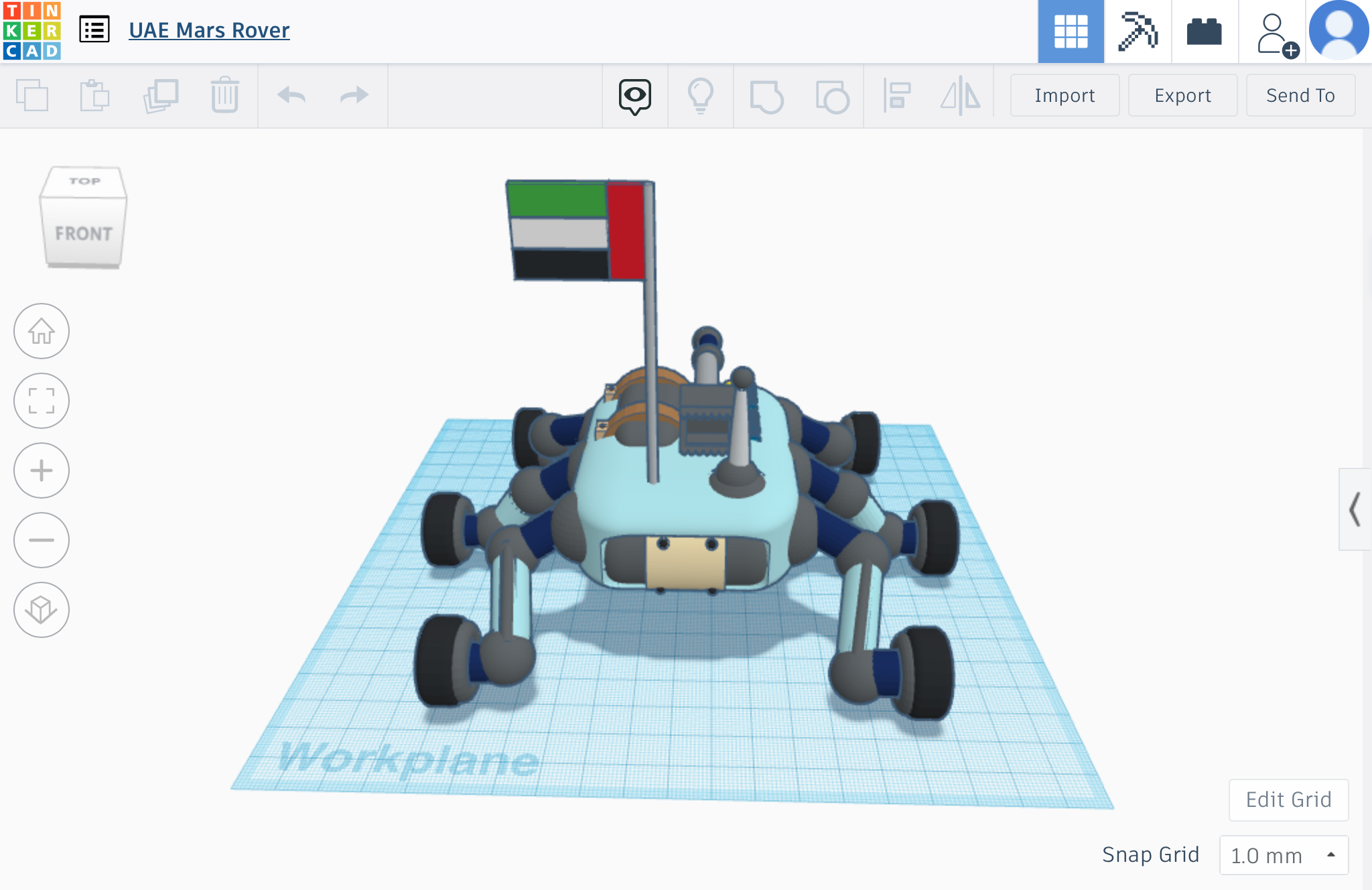
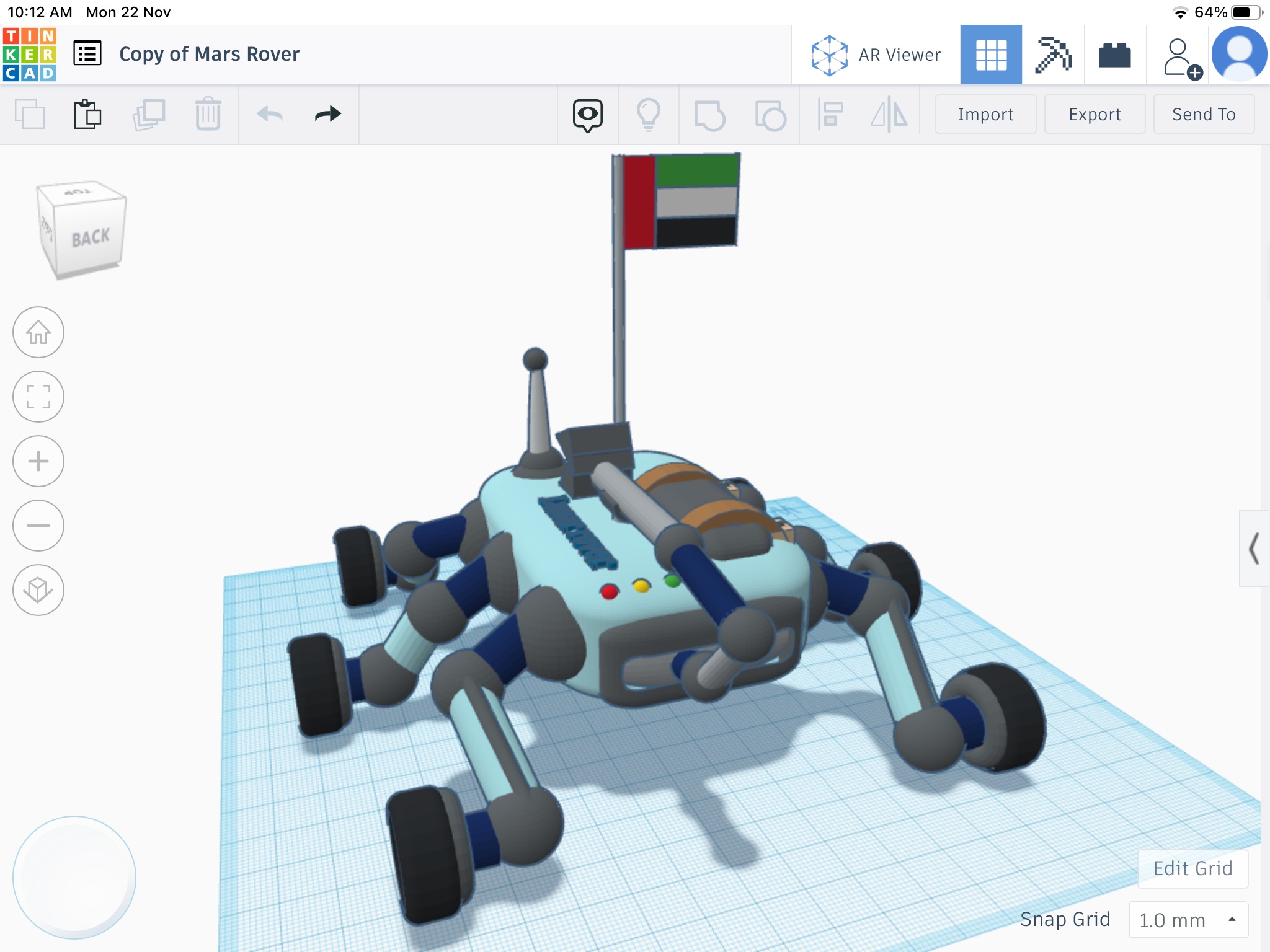
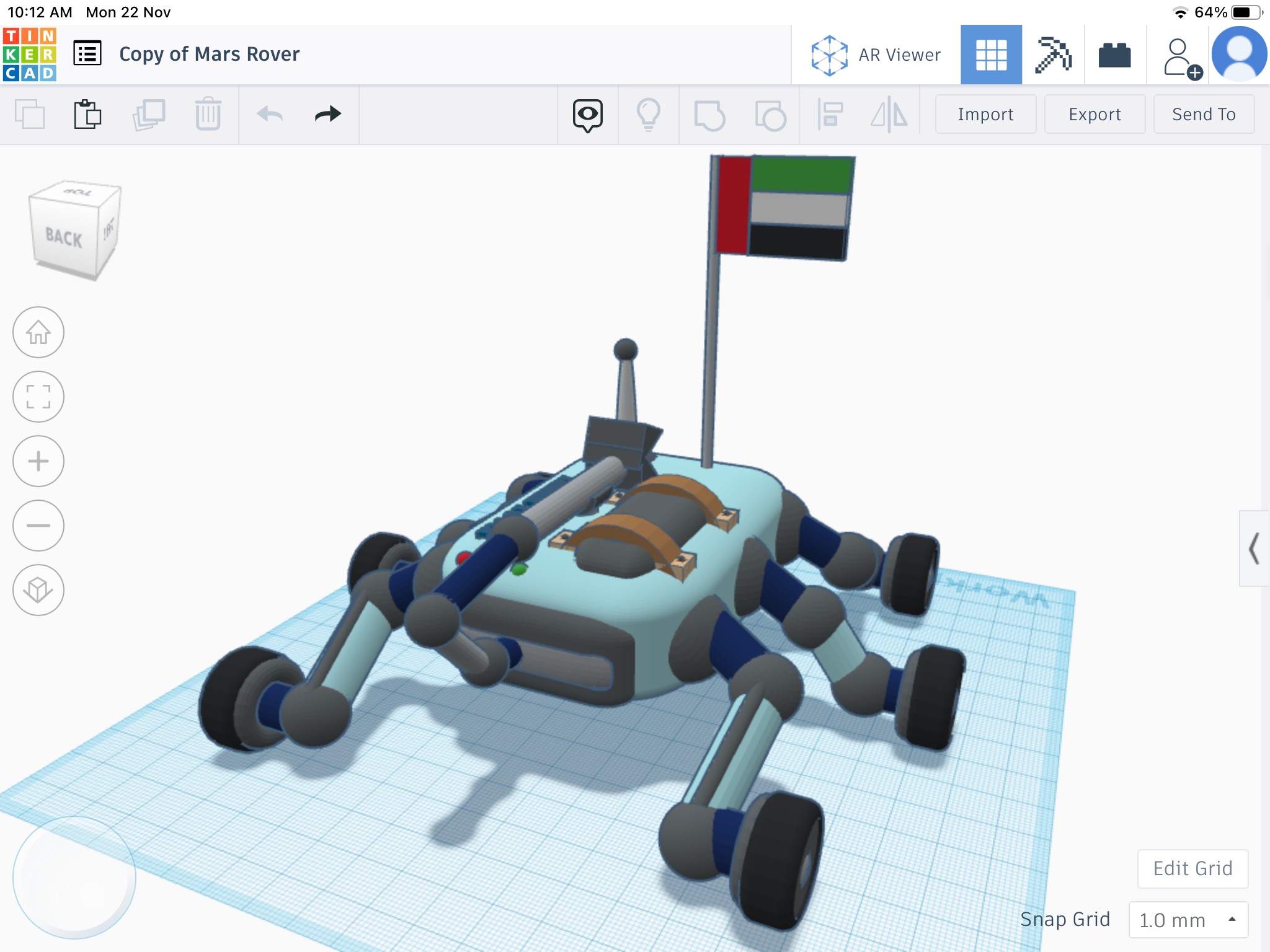
Môj výtvor pre projekt Moon Camp je lunárny rover. Tento nápad som si vybral, pretože som si uvedomil nekonečné možnosti, ktoré by sa dali dosiahnuť, a netradičné nápady, ktoré by som mohol vymyslieť pri jeho tvorbe a ktoré by pomohli pri prežití astronautov na Mesiaci. Môj výtvor pozostáva z 3 robotických nôh s tvrdými a odolnými pneumatikami na zabezpečenie efektívnosti jeho práce bez toho, aby sa cestou pokazil. Pohybujú sa v plnej rotácii o 360°. Zahrnul som aj lopatu podobnú rukoväti, ktorá sa môže vysúvať smerom hore a dole pohybom doľava, doprava, hore a dole. To má zabezpečiť, aby sa vzorky hornín a piesku dali odoberať z akéhokoľvek uhla bez ohľadu na strmosť alebo skalnatosť oblasti. Na hornej vrstve môžete vidieť 2 hnedé rukoväte, ktoré držia kovovú rúrku pripomínajúcu škatuľu, čo je priestor, kde sa skladuje voda, ktorá sa používa na experimentovanie so vzorkami a na hľadanie kompatibility s vodou. Najvýraznejšie použitie môjho výtvoru je na experimentovanie s potravinami a zdrojmi vody zo Zeme a na hľadanie ich kompatibility s lunárnymi zdrojmi, ako sú horniny. Vo vnútri rovera sú uložené jednoduché potraviny, ktoré obsahujú bielkoviny, sacharidy a v podstate všetky ostatné skupiny potravín, ktoré sa používajú na experimentovanie a analýzu. Súčasťou môjho projektu je aj anténa, ktorá sa spája so zemskými satelitmi, aby tu ľudia mohli sledovať jeho pohyb. Vlny zo satelitov sa dajú použiť aj ako spôsob napájania lunárneho rovera, čo pomáha astronautom, pretože batériu, ktorú by použili pre rover, by mohli použiť pre svoje iné potreby. Môj lunárny rover nepotrebuje astronauta, ktorý by na ňom jazdil a pracoval s ním. Keďže je robotický, bol by k dispozícii ovládací panel alebo diaľkové ovládanie, takže astronauti by mohli svoju prácu vykonávať z pohodlia svojho obytného priestoru. Pomohlo by to aj pri ich ochrane. Mal by mnoho rýchlostných režimov, takže astronauti by mohli pracovať rýchlejšie alebo pomalšie podľa svojich predstáv. Bol navrhnutý na maximálnu rýchlosť 11,2 míle za hodinu (18 km/h). Ale v prípade, že by museli odísť mimo základne a pracovať inde, rover by mal núdzovú nádrž s kyslíkom, ak by sa niečo pokazilo.
Ďalšie projekty:
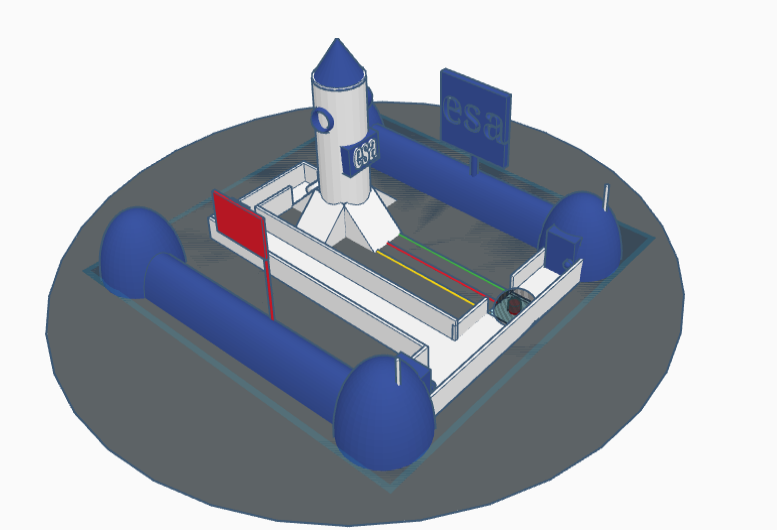
ESA ROCKET - Antonio Muresan
 El Ejido . Almería - Španielsko
Martín Rivero Carrillo
El Ejido . Almería - Španielsko
Martín Rivero Carrillo
 Mairena del Aljarafe - Španielsko
Vesmírne šimpanzy
Mairena del Aljarafe - Španielsko
Vesmírne šimpanzy
 Almería - Španielsko
Almería - Španielsko