Moon Camp Discovery 2021-2022 Projekt-Galerie
Alle | Mondlandefähre | Mondbasis | Lunar-Rover | Rakete | Mondorbitale Raumstation | Raumanzug
Mannschaft: Entdecker
Kategorie: Lunar Rover | Kandy | Sri Lanka | 1 | 14 Jahre alt
Externer Link für Tinkercad 3D Konstruktion


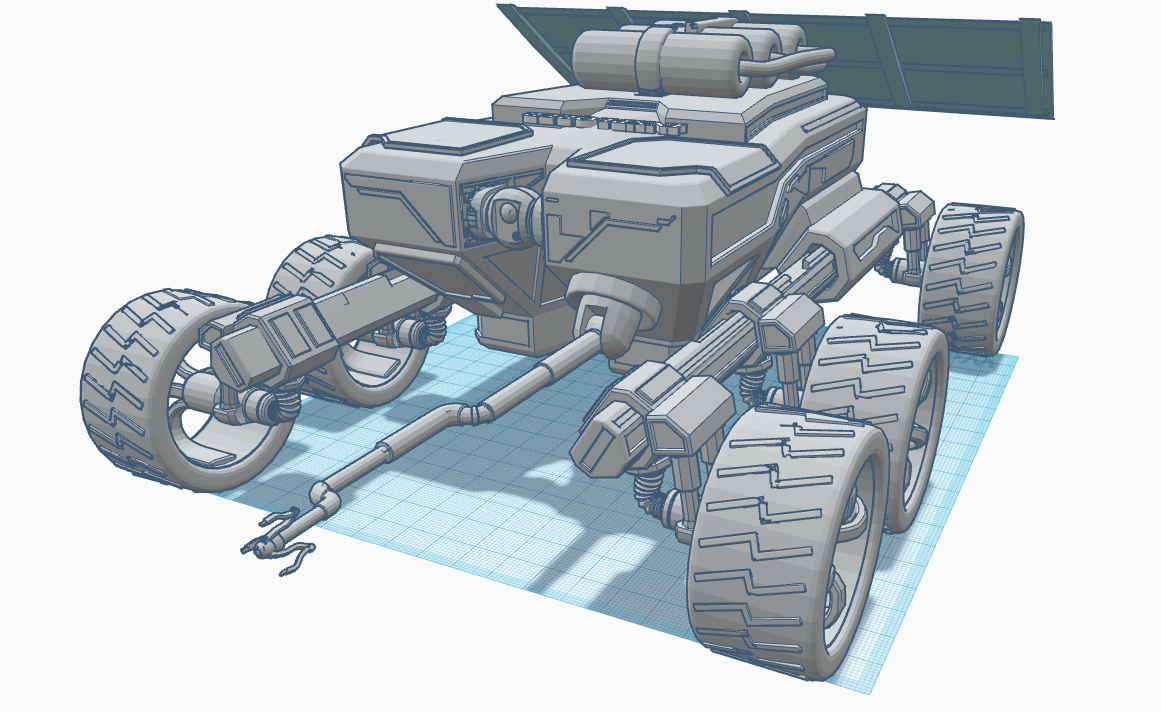
Erforscher Rover
Eine Familie von fünf U-förmigen Mehrzweck-Rovern, die für den Transport von wissenschaftlichen Instrumenten und Nutzlasten ausgelegt sind. Die Juno-Rover wurden in von der NASA geleiteten Feldversuchen an den felsigen Hängen eines hawaiianischen Vulkans eingesetzt, um Missionen zum Mond zu simulieren. Er wurde entwickelt, um Proben vom Mond zu sammeln, wissenschaftliche Messungen vorzunehmen und Aufgaben wie Langstreckenfahrten und das Überleben bei Nacht zu demonstrieren.
Technische Einzelheiten
| Zielort | Mond |
| Größe (Länge, Breite, Höhe) | 1,38 m x 1,6 m x 0,75 m (ohne installierte Mastoption) |
| Masse | 250 kg |
| Kann tragen | 200 kg |
| Geschwindigkeit | 12,5 km/h Höchstgeschwindigkeit |
| Angetrieben durch | Elektrische Energie (Lithium-Ionen-Batterien) |
Höhepunkte
- Der Inxplorer kann fast so viel tragen, wie er wiegt, ist erstaunlich schnell und wendig und kann über alle Arten von Gelände und große Felsen fahren. Und er kann in Felsen bohren, Proben nehmen und mit seinem hochauflösenden Mikroskopinstrument Analysen von Felsen durchführen.
- Er kann entweder von einem Menschen in der Nähe bedient werden oder seine Umgebung scannen und selbständig navigieren. Sobald er ein Ziel entdeckt hat, kann der vollautonome Rover selbst zu dem Ort fahren, mit seinem Roboterarm einen Graben ausheben, Proben entnehmen und sie in den Sammelbehältern auf seinen beiden "Schultern" deponieren
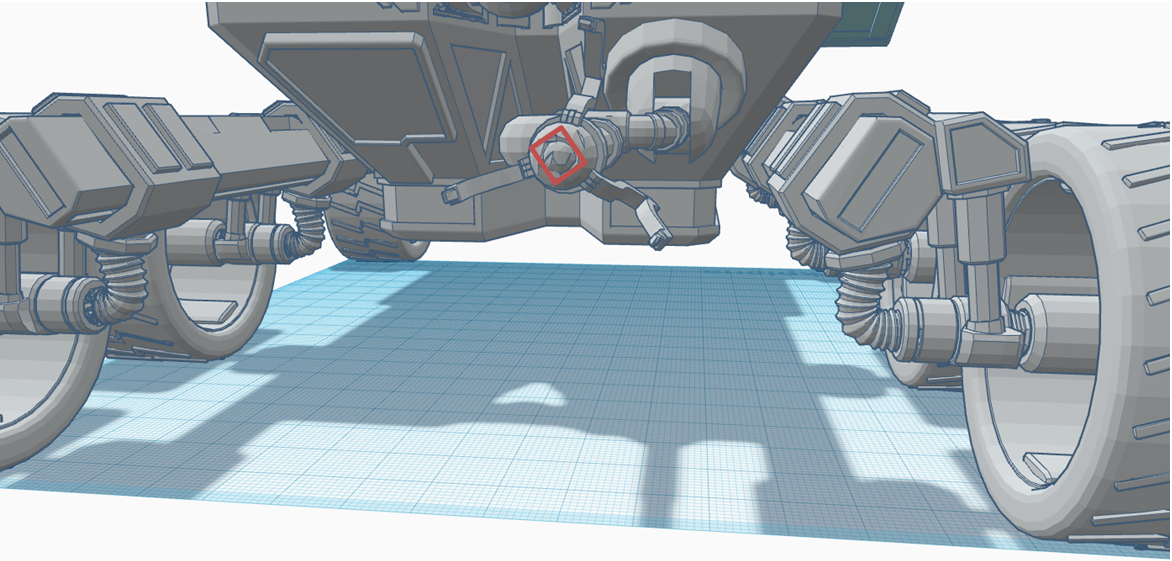
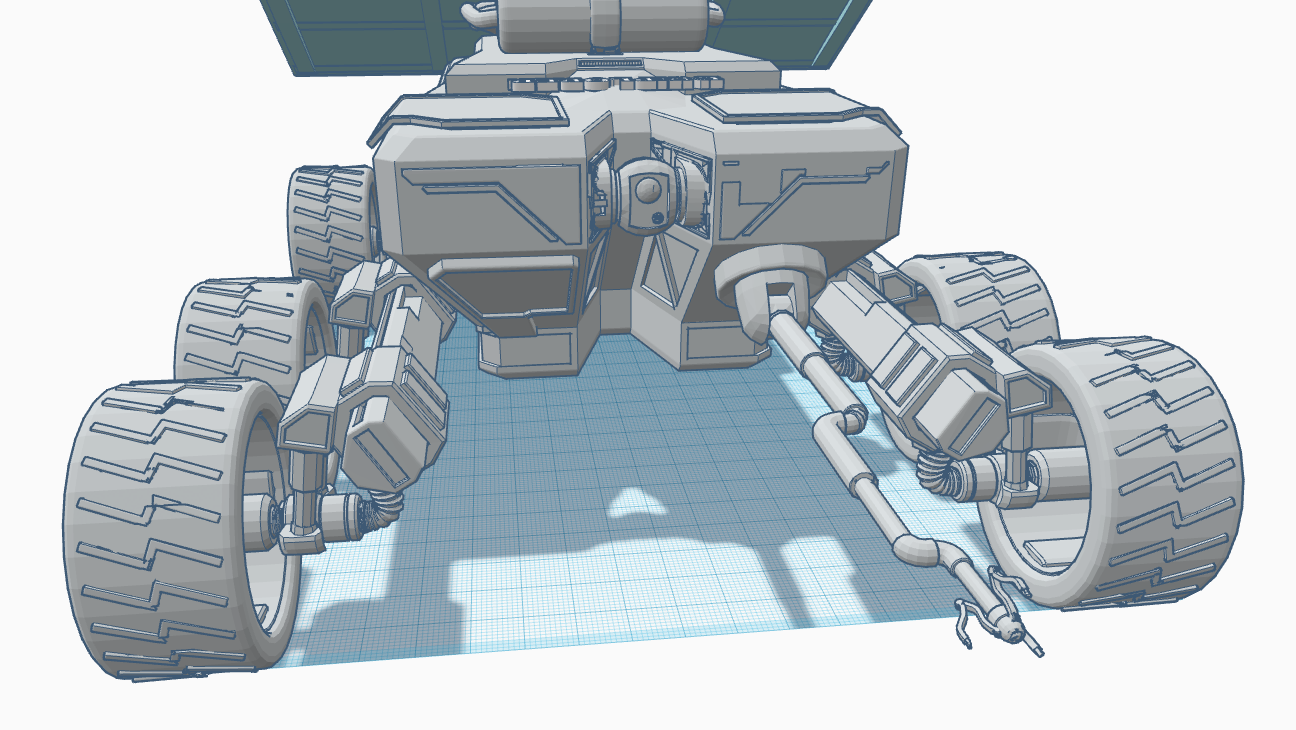
- 4-Rad-Antrieb mit einem einzigartigen Radsystem, das eine Drehung um 360 Grad an der gleichen Stelle ermöglicht
- Sein grabender Roboterarm dient gleichzeitig als Mast für Sensoren, mit denen er seine Umgebung scannen und kartieren kann, um nach Mineralien, Wasser oder Eis zu suchen
- Dieser Rover kann mit dem Nachtmodus auch problemlos in der Nacht fahren. Rover hat zwei Hauptlicht- und Nachtkameras für qualitativ hochwertige Bilder.
ERKUNDUNG ERFORDERT MOBILITÄT
Exploration erfordert Mobilität. Und egal, ob Sie auf der Erde oder auf dem Mond oder Mars unterwegs sind, Sie brauchen gute Reifen, um Ihr Fahrzeug von einem Ort zum anderen zu bringen.
Räder auf dem Mond
Drei große Radausführungen wurden von der NASA und anderen internationalen Forschern für die frühe Erkundung eingeführt. Obwohl sie sich stark voneinander unterschieden, waren sie alle darauf ausgerichtet, Hardware und Astronauten über die Mondoberfläche zu transportieren.
Frühjahrsbereifung
Außerdem kann der Inxplorer Rover seine Achsenlänge anpassen und Felsen und kleine Gruben passieren.
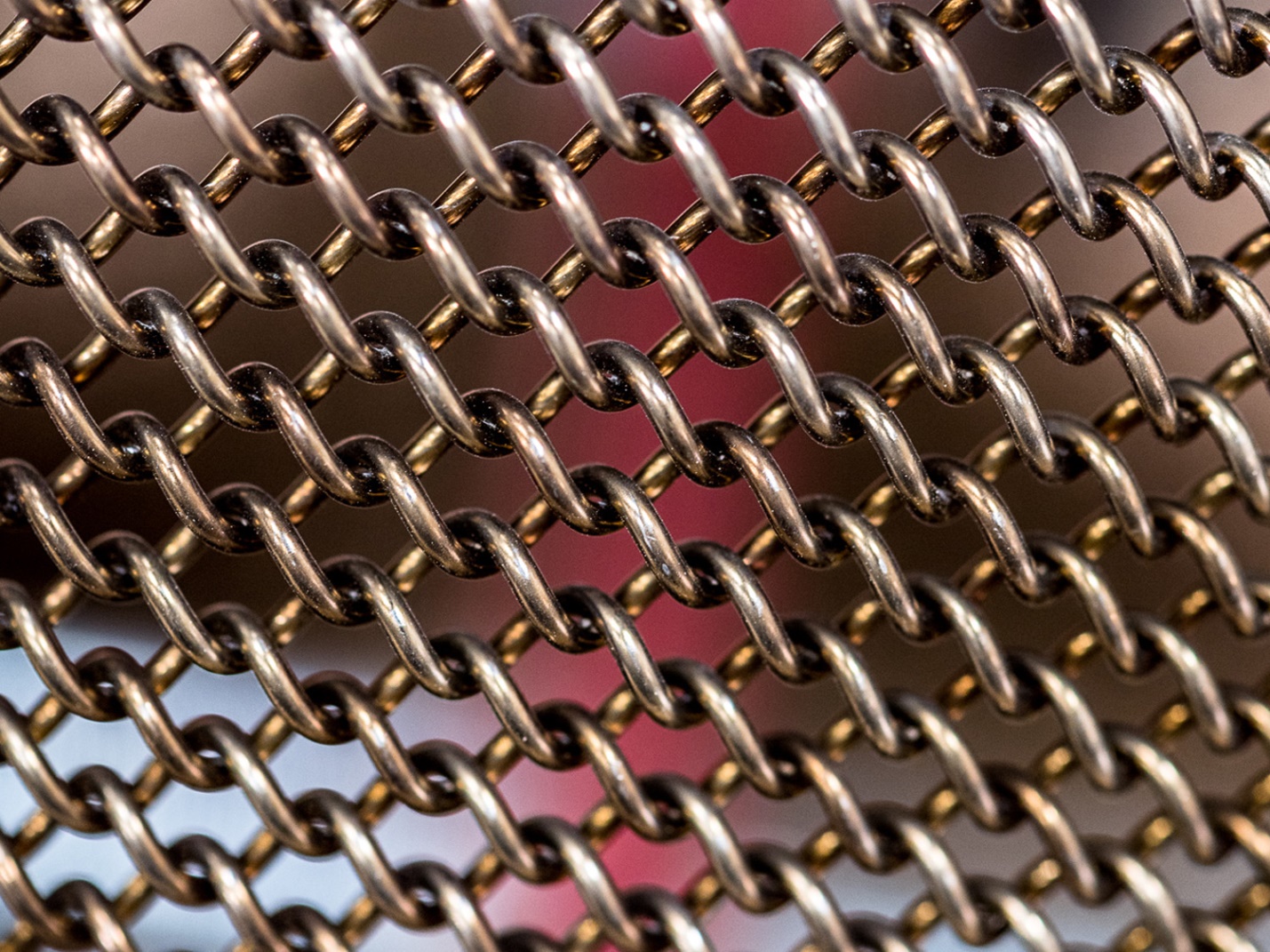
Architektur der Reifen
Während bei früheren Reifenkonstruktionen gewebter Draht verwendet wurde, verwenden wir Federreifen, die aus einer Reihe miteinander verbundener Spulen bestehen. Sie wiegen etwa 20 Pfund und können eine Last von 165 Pfund tragen. Wir hoffen, dass wir diese Räder für Rover verwenden können.
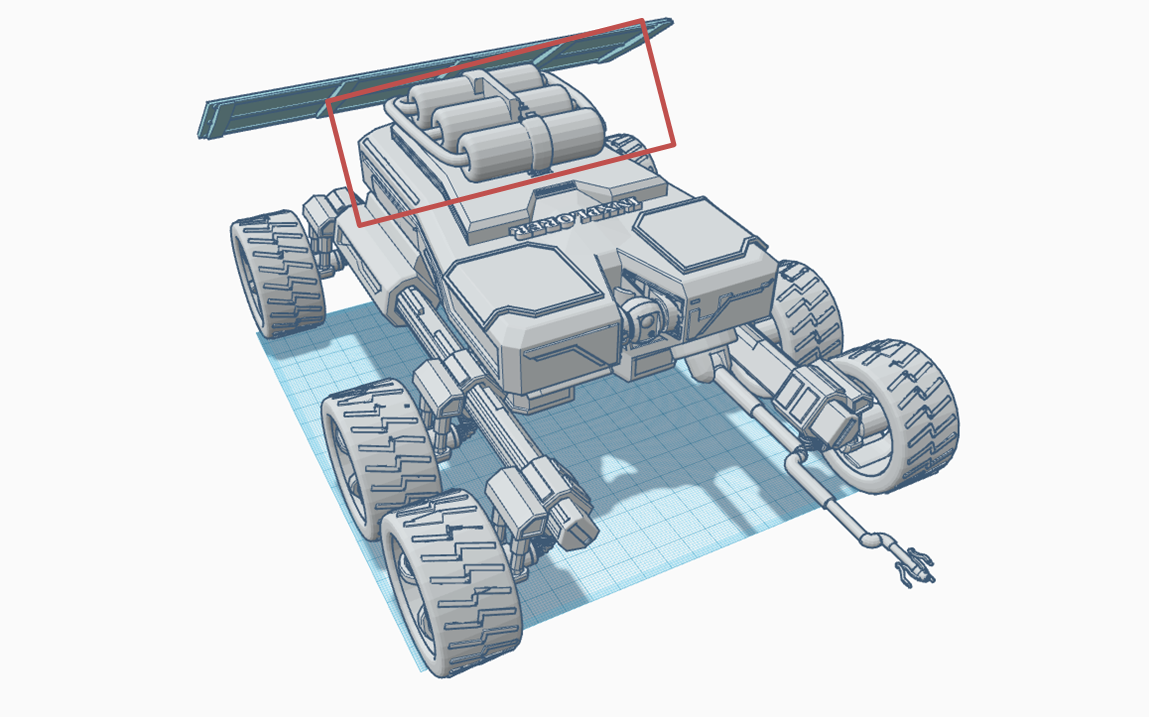
ISRU-Instrument
Als Inxpolrer-Team vergessen wir nicht, einen ISRU-Teil für unseren Rover hinzuzufügen. Dieser Teil kann die Gewinnung von Metallen für Baumaterialien im Weltraum beinhalten, was kosteneffektiver sein kann, als solches Material aus der tiefen Schwerkraft der Erde oder eines anderen großen Körpers wie dem Mond oder Mars zu holen.
Standorte
Mond
Der Mond verfügt über eine Fülle von Rohstoffen, die für eine Reihe künftiger Anwendungen von Bedeutung sein können, angefangen von der Nutzung lunarer Materialien zur Erleichterung menschlicher Aktivitäten auf dem Mond selbst bis hin zur Nutzung lunarer Ressourcen als Grundlage für eine künftige industrielle Kapazität im Erde-Mond-System. Zu den natürlichen Ressourcen gehören Sonnenenergie, Sauerstoff, Wasser, Wasserstoff und Metalle. Das lunare Hochlandmaterial Anorthit kann als Aluminiumerz verwendet werden. Hüttenwerke können aus Anorthit reines Aluminium, Kalziummetall, Sauerstoff und Quarzglas herstellen. Rohes Anorthit eignet sich auch zur Herstellung von Glasfasern und anderen Glas- und Keramikprodukten. Eine besondere Verarbeitungstechnik besteht darin, das von der Erde in Form von Kaliumfluorid eingebrachte Fluor zu verwenden, um die Rohstoffe vom Mondgestein zu trennen. Für die Gewinnung von Sauerstoff aus dem Mondregolithen wurden über zwanzig verschiedene Methoden vorgeschlagen. Sauerstoff ist in eisenhaltigen Mondmineralen und -gläsern häufig als Eisenoxid enthalten. Der Sauerstoff kann extrahiert werden, indem das Material auf Temperaturen über 900 °C erhitzt und Wasserstoffgas ausgesetzt wird. Die Grundgleichung lautet: FeO + H2 → Fe + H2O. Dieses Verfahren wurde vor kurzem durch die Entdeckung erheblicher Mengen wasserstoffhaltigen Regoliths in der Nähe der Mondpole durch die Raumsonde Clementine sehr viel praktischer gemacht. Mondmaterial kann auch als allgemeines Baumaterial verwendet werden. durch Verarbeitungstechniken wie SinterungHeißpressen, Verflüssigung und das Schmelzbasaltverfahren. Schmelzbasalt wird auf der Erde z. B. für den Bau von Rohren verwendet, bei denen eine hohe Abriebfestigkeit erforderlich ist. Glas und Glasfaser sind auf dem Mond und dem Mars leicht zu verarbeiten. Basaltfasern wurden auch aus Mondregolith-Simulatoren hergestellt.
Auf der Erde wurden bereits erfolgreiche Tests mit zwei Mondregolith-Simulatoren durchgeführt MLS-1 und MLS-2. Im August 2005 beauftragte die NASA die Herstellung von 16 Tonnen simuliertem Mondboden oder Mondregolith-Simulationsmaterial für die Erforschung der Nutzung von Mondboden in situ.
Inxplorer Rover ISRU-Fähigkeitsklassifizierung
- Ressourcenextraktion
- Materialumschlag und Transport
- Oberflächenfertigung mit in situRessourcen
- Oberflächengestaltung
- Lagerung und Verteilung von ISRU-Produkten und Verbrauchsmaterialien an der Oberfläche
- Einzigartige ISRU-Entwicklungs- und Zertifizierungskapazitäten
Andere Teile
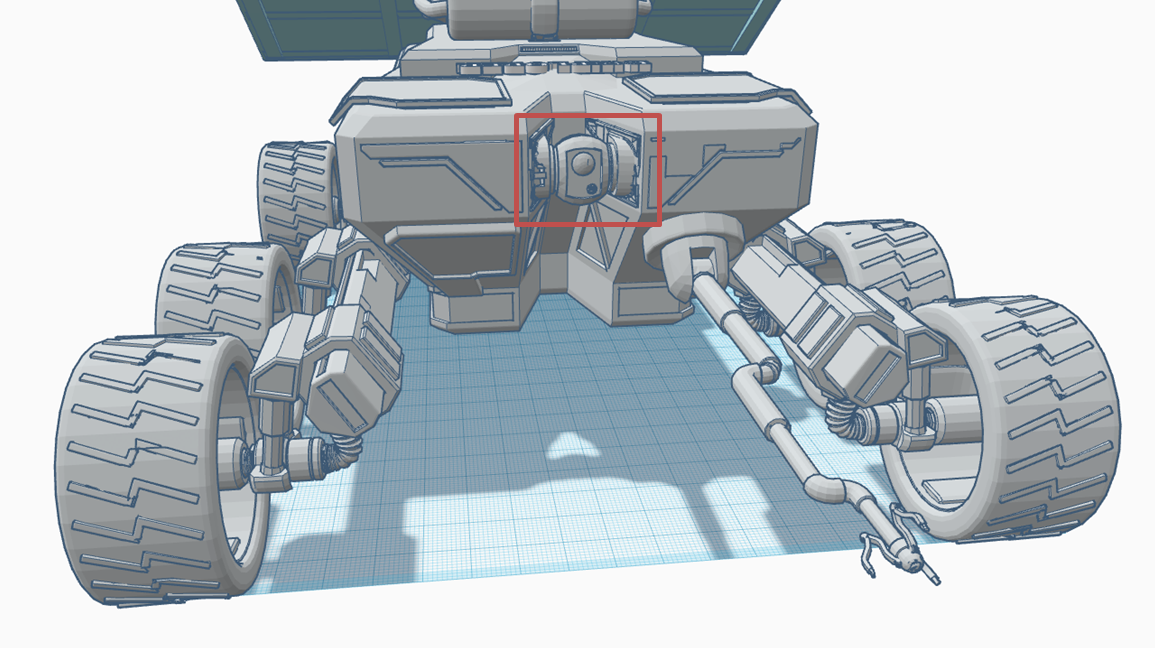
Die Kameras
Die "Augen" und andere "Sinne" des Rovers
Der Perseverance-Rover verfügt über mehrere Kameras, die sich auf technische und wissenschaftliche Aufgaben konzentrieren. Einige helfen uns bei der Landung auf dem Mars, während andere als unsere "Augen" auf der Oberfläche dienen, um herumzufahren. Andere nutzen wir für wissenschaftliche Beobachtungen und zum Sammeln von Proben.
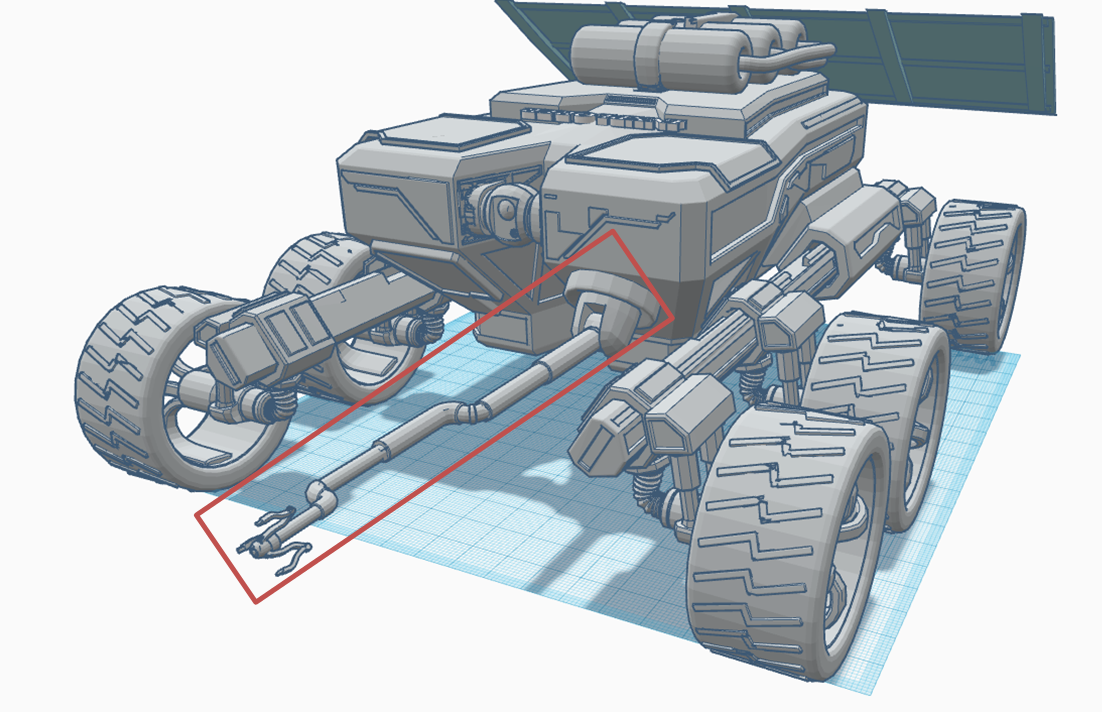
Roboterarm
Der 3 Fuß lange Roboterarm des Inxplorer kann sich ähnlich bewegen wie Ihrer. Außerdem können wir die Länge auf bis zu 1,80 m erhöhen. Er verfügt über Schulter-, Ellbogen- und Handgelenk-"Gelenke" für maximale Flexibilität. Der Arm ermöglicht es dem Rover, wie ein menschlicher Geologe zu arbeiten, indem er mit seiner "Hand" oder seinem Revolver wissenschaftliche Werkzeuge hält und benutzt. Mit den "Handwerkzeugen" des Rovers werden Gesteinskerne entnommen, mikroskopische Aufnahmen gemacht und die elementare und mineralische Zusammensetzung von Mondgestein und -boden analysiert.
Technische Daten
Länge: 6 Fuß (1,8 Meter)
Namen der Werkzeuge auf dem Revolver: SHERLOC und WATSON, PIXL, GDRT (Gaseous Dust Removal Tool), Bodenkontaktsensor, Bohrer
Bohrer: Der Bohrer ist ein rotierender Schlagbohrer, mit dem Gesteinskerne von der Marsoberfläche entnommen werden können.
Bohreinsätze: Eine Reihe von austauschbaren Meißeln: Entkernungsmeißel, Regolithmeißel und ein Abrasionsgerät.
Hauptfunktion: Unterstützung bei der Untersuchung der Marsoberfläche und der Sammlung von Proben
Durchmesser der gebohrten Löcher:1 Zoll (27 mm)
Bohrer
Der Bohrer des Rovers wird durch Drehbewegungen mit oder ohne Schlagwirkung in die Marsoberfläche eindringen, um die wertvollen Proben zu sammeln. Der Bohrer ist mit drei verschiedenen Arten von Aufsätzen (Bits) ausgestattet, die die Probennahme und Oberflächenanalyse erleichtern. Mit dem Kernbohrer und dem Regolith-Bohrer werden die Marsproben direkt in ein sauberes Probensammelrohr entnommen, während der Abrasionsbohrer dazu dient, die obersten Gesteinsschichten abzukratzen, um frische, unverwitterte Oberflächen für die Untersuchung freizulegen.
Arten von Gesteinsproben, die mit dem Bohrer entnommen werden
Rock-Proben
Der zylindrische Bohrer schneidet Proben aus dem Gesteinsinneren heraus und bricht die Gesteinsprobe an der Basis ab.
Probenahmegeräte an der "Hand" (Revolver)
Am Ende des Arms befindet sich der "Revolver". Er ist wie eine Hand, die wissenschaftliche Kameras, Mineralien- und chemische Analysatoren trägt, um die frühere Bewohnbarkeit des Mars zu untersuchen und die wissenschaftlich wertvollsten Proben für das Caching auszuwählen.
Bodenkontakt-Sensor
Der Revolver ist mit einem speziellen Sensor ausgestattet, der vor Schäden schützt, wenn der Arm mit der Oberfläche in Berührung kommt. Der Kontaktsensor signalisiert dem Roverarm, dass er anhalten soll, wenn er versehentlich den Boden berührt.
Handhabung von Proben
Inxplorer wird Kernproben aus Mondgestein und -boden entnehmen. Mit seinem Bohrer wird der Rover die Kerne sammeln und in Röhren auf der Mondoberfläche lagern.
Temperatur-Kontrollen
Um während der verschiedenen Missionsphasen zu überleben, dürfen die "lebenswichtigen Organe" des Rovers extreme Temperaturen von -173° (-280° Fahrenheit) Celsius bis +127° Celsius (260° Fahrenheit) nicht überschreiten.
Das Wesentliche des Rovers, wie die Batterien, die Elektronik und der Computer, die im Grunde das Herz und das Gehirn des Rovers darstellen, sind in einer Warm Electronics Box (WEB) sicher untergebracht, die gemeinhin als "Roverkörper" bezeichnet wird. Wie ein warmer Mantel halten die Wände des Rovers die Wärme im Innern, wenn die Nachttemperaturen auf dem Mond auf bis zu -173° Celsius fallen können. So wie ein Sportler nach einem intensiven Training schwitzt, um die Wärme abzugeben, kann auch der Rover-Körper überschüssige Wärme über seine Kühler abgeben, die denen von Automotoren ähneln.
Erforscher: Rover-Teile
Der Rover hat ein:
| ein Körper: | eine Struktur, die die "lebenswichtigen Organe" der Rover schützt |
| Gehirne: | Computer zur Verarbeitung von Informationen |
| Temperaturregelung: | interne Heizungen, eine Isolierschicht und mehr |
| ein "Hals und Kopf": | ein Mast für die Kameras, um den Rovern eine Sicht in Menschengröße zu ermöglichen |
| Augen und andere "Sinne": | Kameras und Instrumente, die den Rovern Informationen über ihre Umgebung liefern |
| Arm: | eine Möglichkeit, seine Reichweite zu vergrößern |
| Räder und "Beine": | Teile für die Mobilität |
| Energie: | Batterien und Solarzellen |
| Kommunikation: | Antennen für "Sprechen" und "Hören" |
Andere Projekte:
AZ Mondbasis
 Hongkong - Hongkong
MindLab Edu GR Alexandros
Hongkong - Hongkong
MindLab Edu GR Alexandros

 THESSALONIKI - Griechenland
Šimon Petr Damm
THESSALONIKI - Griechenland
Šimon Petr Damm

 Ratiboř - Tschechische Republik
Ratiboř - Tschechische Republik