
 Brève description :
Brève description :Dans cette activité, les élèves comparent les avantages et les inconvénients des sources d'énergie renouvelables et des sources d'énergie non renouvelables et étudient des circuits électriques simples.
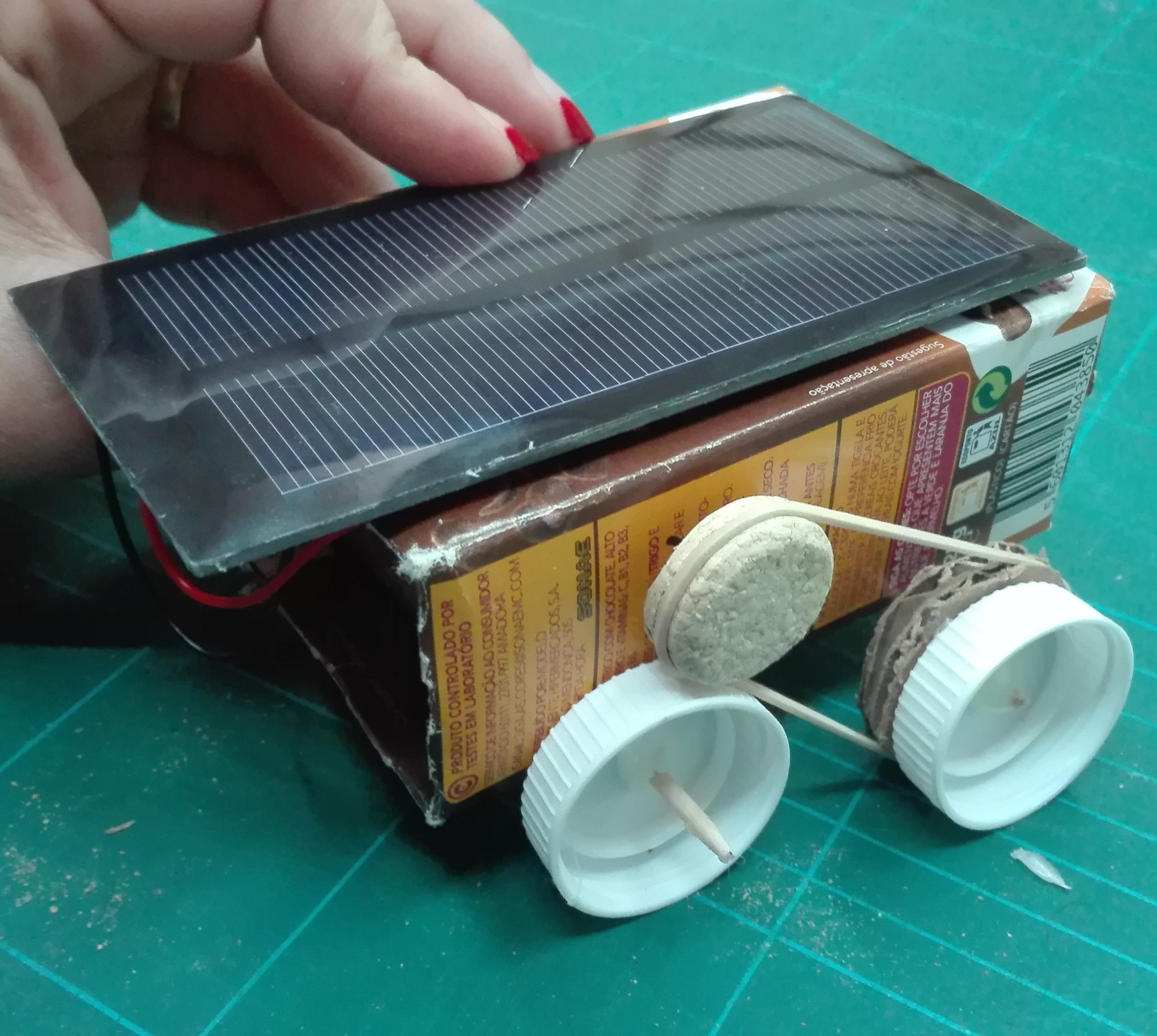
En utilisant la Lune comme contexte, les élèves construiront un petit moteur et une cellule solaire. Ils identifieront également les principales caractéristiques que leur rover doit avoir pour aller sur la Lune, et amélioreront la conception initiale de leur rover.

Le banc d'essai de l'autonomie des Rover de l'ESA, équipé de modules légers

Signes avant-coureurs d'une étoile filante - Comètes, météores et cratères dans le système solaire
Brève description : Pour de nombreuses civilisations anciennes, le récit d'une étoile filante était un présage. Dans cette série d'activités, les élèves

Mission sur la Lune - Programmez un camarade de classe pour qu'il effectue une mission sur la Lune.
Brève description : Cette activité initiera les élèves au raisonnement logique en planifiant, testant et exécutant une mission simple sur la Lune. Les élèves travailleront en

L'eau sur la Lune - Filtrer les carottes de glace lunaire pour en extraire l'eau
Brève description : Dans cette ressource, les élèves passent une journée à noter approximativement la quantité d'eau qu'ils utilisent pour différentes activités. Cette activité est suivie d'une